Настройте ПИД-регуляторы
Панель инструментов MATLAB: На вкладке Apps, под Control System Design and Analysis, кликают по значку приложения.
Подсказка команды MATLAB: Введите pidTuner.
Модель Simulink: В диалоговом окне блока PID Controller или PID Controller (2DOF) нажмите Tune.
Plant — Текущий объектImport |...Изображения меню Plant имя текущего объекта, который PID Tuner использует для проектирования контроллера.
Измените текущий объект с помощью следующих пунктов меню:
Список моделей LTI, существующих в Браузере Данных PID Tuner.
Импорт Импортируйте новую модель LTI из рабочего пространства MATLAB.
Re-Linearize Closed Loop — Линеаризуйте объект в различное время снимка состояния. Смотрите Мелодию в Различной Рабочей точке (Simulink Control Design). Эта опция доступна только при настройке блока PID Controller или PID Controller (2DOF) в модели Simulink.
Identify New Plant — Используйте систему идентификации, чтобы получить объект из измеренных или моделируемых данных об отклике системы (требует программного обеспечения System Identification Toolbox). См.:
В интерактивном режиме Оценочные Параметры Объекта от Данных об Ответе, при настройке ПИД-регулятора для модели LTI.
В интерактивном режиме Оценочный Объект от Измеренных или Моделируемых Данных об Ответе (Simulink Control Design), при настройке блока PID Controller в модели Simulink.
Если вы настраиваете ПИД-регулятор для объекта, представленного моделью LTI, объект по умолчанию:
Plant = 1, если вы открыли PID Tuner от вкладки Apps в Панели инструментов MATLAB, или если вы использовали команду pidTuner без входного параметра.
Объект вы задали как входной параметр к pidTuner.
Если вы настраиваете блок PID Controller или PID Controller (2DOF) в модели Simulink, то объект по умолчанию линеаризуется в рабочей точке, заданной образцовыми начальными условиями. Смотрите, Какой Объект PID Tuner Видит? (Simulink Control Design)
Ввод Тип контроллера'PI' | 'PIDF' | 'PID2' |...Тип контроллера задает, какие условия присутствуют в ПИД-регуляторе. Например, у контроллера PI есть пропорциональное и интегральный термин. У контроллера PDF есть пропорциональный термин и отфильтрованный производный термин.
Если вы настраиваете контроллер для объекта, представленного моделью LTI, используйте меню Type, чтобы задать тип контроллера. Когда вы изменяете тип контроллера, PID Tuner автоматически разрабатывает новый контроллер. Доступные типы контроллера включают ПИД-регуляторы 2-DOF для большей гибкости в компромиссе между подавлением помех и отслеживанием уставки. Для получения дополнительной информации на доступных типах контроллера, смотрите Типы ПИД-регулятора для Настройки.
Если вы настраиваете блок PID Controller или PID Controller (2DOF) в модели Simulink, поле Type отображает тип контроллера, заданный в диалоговом окне блока.
Form — Форма контроллера'Parallel' | 'Standard'Это поле отображает форму контроллера.
Если вы настраиваете контроллер для объекта, представленного моделью LTI, используйте меню Form, чтобы задать форму контроллера. Для получения информации о параллельных и стандартных формах смотрите страницы с описанием pidstd и pid.
Если вы настраиваете блок PID Controller или PID Controller (2DOF) в модели Simulink, поле Form отображает форму контроллера, заданную в диалоговом окне блока.
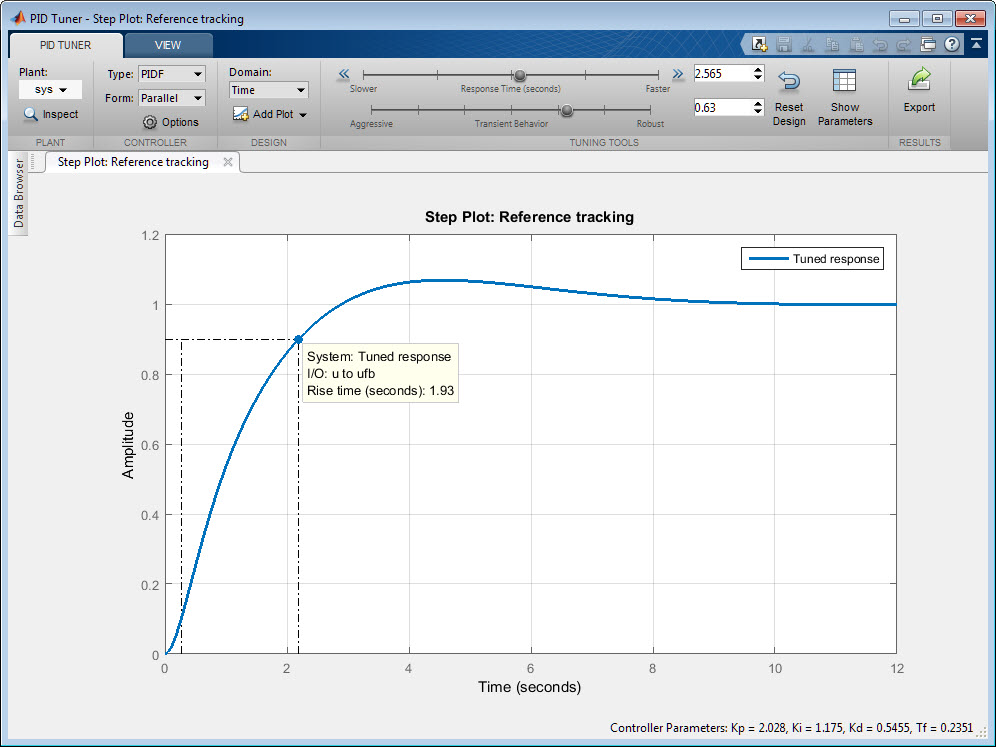
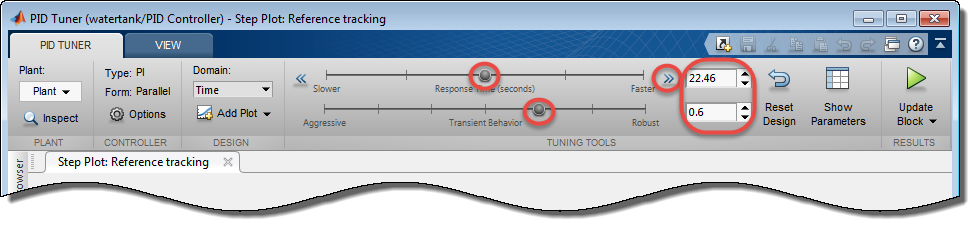
Domain — Область для определения поставленных задач'Time' | 'Frequency'Меню Domain позволяет вам переключить область, в которой PID Tuner отображает целевые эксплуатационные параметры.
Время Ползунки устанавливают Response Time и Transient Behavior.
Frequency — Ползунки устанавливают Bandwidth и Phase Margin.
Чтобы совершенствовать проектирование контроллера, вы настраиваете целевые эксплуатационные параметры с помощью ползунков или соответствующих числовых значений.
Для получения дополнительной информации см.:
Совершенствуйте Проект (настраивающий контроллер для модели LTI)
Совершенствуйте Проект (Simulink Control Design) (настраивающий блок PID Controller или PID Controller (2DOF) в модели Simulink)
Add Plot — Создайте графики для анализаReference Tracking | Input Disturbance Rejection | Controller Effort |...Создайте временной интервал и графики для анализа частотного диапазона, чтобы помочь анализировать производительность ПИД-регулятора. Для получения дальнейшей информации о доступных графиках ответа, см.:
Анализируйте Проект в PID Tuner (настраивающий контроллер для модели LTI)
Анализируйте Проект в PID Tuner (Simulink Control Design) (настраивающий блок PID Controller или PID Controller (2DOF) в модели Simulink)
