Обратный луч вентилятора преобразовывает
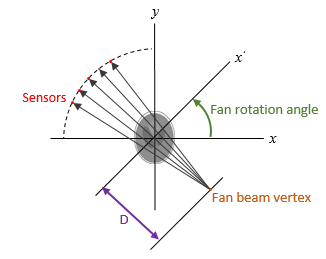
I = ifanbeam(F,D)I = ifanbeam(F,D,Name,Value)[I,H] = ifanbeam(___)I = ifanbeam(F,D)I от данных о проекции луча вентилятора в F. Каждый столбец F содержит данные о проекции луча вентилятора в одном угле поворота. Угол между датчиками принят, чтобы быть универсальным и равным шагу между углами поворота луча вентилятора. D является расстоянием от вершины луча вентилятора до центра вращения.
I = ifanbeam(F,D,Name,Value)
Создайте демонстрационное изображение. Функция phantom создает фантомное главное изображение.
ph = phantom(128);
Создайте преобразование луча вентилятора фантомного главного изображения.
d = 100; F = fanbeam(ph,d);
Воссоздайте фантомное главное изображение от представления луча вентилятора. Отобразите оригинальное изображение и воссозданное изображение.
I = ifanbeam(F,d); imshow(ph)
![]()
figure imshow(I);
![]()
Создайте демонстрационное изображение. Фантомная функция создает фантомное главное изображение.
ph = phantom(128);
Создайте преобразование радона изображения.
P = radon(ph);
Преобразуйте преобразование от параллельной проекции луча до проекции луча вентилятора.
[F,obeta,otheta] = para2fan(P,100,... 'FanSensorSpacing',0.5,... 'FanCoverage','minimal',... 'FanRotationIncrement',1);
Воссоздайте изображение от данных луча вентилятора.
phReconstructed = ifanbeam(F,100,... 'FanSensorSpacing',0.5,... 'Filter','Shepp-Logan',... 'OutputSize',128,... 'FanCoverage','minimal',... 'FanRotationIncrement',1);
Отобразите оригинал и преобразованное изображение.
imshow(ph)

figure imshow(phReconstructed)

F Данные о проекции луча вентилятораДанные о проекции луча вентилятора, заданные как numsensors-by-numangles числовая матрица. numsensors является количеством датчиков луча вентилятора, и numangles является количеством углов поворота луча вентилятора. Каждый столбец F содержит выборки датчика луча вентилятора в одном угле поворота.
Типы данных: double | single
D Расстояние от вершины луча вентилятора до центра вращенияРасстояние в пикселях от вершины луча вентилятора до центра вращения, заданного как положительное число. ifanbeam принимает, что центр вращения является центральной точкой проекций, которая задана как ceil(size(F,1)/2). Фигура иллюстрирует D относительно вершины луча вентилятора для одной проекции луча вентилятора.
Типы данных: double | single
Укажите необязательные аргументы в виде пар ""имя, значение"", разделенных запятыми. Имя (Name) — это имя аргумента, а значение (Value) — соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
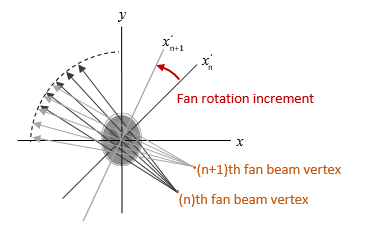
I = ifanbeam(F,D,'FanRotationIncrement',5)Угол поворота луча вентилятора постепенно увеличивается в градусах, заданный как пара, разделенная запятой, состоящая из 'FanRotationIncrement' и положительной скалярной величины.
Типы данных: double
Расположение датчика луча вентилятора, заданное как пара, разделенная запятой, состоящая из 'FanSensorGeometry' и одно из следующих значений.
Значение | Значение | Схема |
|---|---|---|
| Датчики расположены с интервалами под равными углами вдоль круговой дуги на расстоянии
| 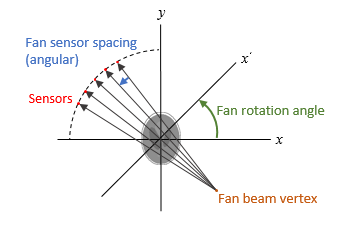 |
| Датчики расположены с интервалами на равных расстояниях вдоль строки, которая параллельна x' ось. Самый близкий датчик является расстоянием
| 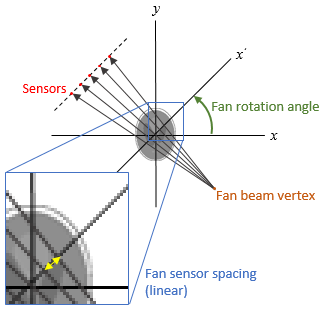 |
фильтр Фильтр'Ram-Lak' (значение по умолчанию) | 'Shepp-Logan' | 'Cosine' | 'Hamming' | 'Hann' | 'None'Отфильтруйте, чтобы использовать для фильтрации частотного диапазона, заданной как пара, разделенная запятой, состоящая из 'Filter' и одно из значений в таблице. Для получения дополнительной информации смотрите iradon.
Значение | Описание |
|---|---|
| Обрезанный Поршень-Lak или фильтр пандуса. Частотная характеристика этого фильтра | |
| Умножает фильтр Поршня-Lak по функции |
| Умножает фильтр Поршня-Lak по функции |
| Умножает фильтр Поршня-Lak по Окну Хэмминга |
| Умножает фильтр Поршня-Lak по окну Hann |
'None' | Никакая фильтрация. ifanbeam возвращает неотфильтрованные данные. |
Типы данных: char | string
'FrequencyScaling' — ScaleFactor 1 (значение по умолчанию) | положительное число в области значений (0, 1]Масштабный коэффициент для перемасштабирования оси частоты, заданной как пара, разделенная запятой, состоящая из 'FrequencyScaling' и положительного числа в области значений (0, 1]. Если 'FrequencyScaling'[0,FrequencyScaling] в нормированных частотах; все частоты выше FrequencyScaling установлены в 0. Для получения дополнительной информации смотрите iradon.
Типы данных: double
Интерполяция Тип интерполяции'Linear' (значение по умолчанию) | 'nearest' | 'spline' | 'pchip'Тип интерполяции используется между параллельным лучом и данными луча вентилятора, заданными как пара, разделенная запятой, состоящая из 'Interpolation' и одно из следующих значений.
самый близкий NearestNeighbor
'linear' — Линейный (значение по умолчанию)
сплайн Кусочный кубический сплайн
pchip Кусочный кубический Эрмит (PCHIP)
Типы данных: char | string
'OutputSize' Размер восстановленного изображенияРазмер восстановленного изображения, заданного как пара, разделенная запятой, состоящая из 'OutputSize' и положительного целого числа. Изображение имеет равное количество строк и столбцов.
Если вы задаете OutputSize, то ifanbeam восстанавливает меньший или больший фрагмент изображения, но не изменяет масштабирование данных.
Если проекции были вычислены с функцией fanbeam, то восстановленное изображение не может быть одного размера как оригинальное изображение.
Если вы не задаете OutputSize, то размер вычисляется автоматически:
OutputSize = 2*floor(size(R,1)/(2*sqrt(2)))где R является длиной данных о проекции параллельного луча, используемых iradon. Для получения дополнительной информации см. Алгоритмы.
Типы данных: double
ifanbeam преобразовывает данные луча вентилятора, чтобы быть параллельным проекциям луча и затем использует отфильтрованный алгоритм задней проекции, чтобы выполнить обратный Радон, преобразовывают. Фильтр разработан непосредственно в частотном диапазоне и затем умножен на БПФ проекций. Проекции дополнены нулем к степени 2 прежде, чем отфильтровать, чтобы предотвратить пространственное доменное искажение и ускорить БПФ.
[1] Kak, A. C., и М. Слэни, принципы компьютеризированной томографической обработки изображений, Нью-Йорка, Нью-Йорка, нажатия IEEE, 1988.
