Трение в гидравлических цилиндрах
Гидравлические цилиндры
Блок Cylinder Friction моделирует трение в контакте между тем, чтобы двигать телами в гидравлических цилиндрах и предназначается, чтобы использоваться, в основном, в качестве стандартного блока и в сочетании с двойным - и в сочетании с цилиндрами одностороннего действия, чтобы разработать цилиндрическую модель с трением. Сила трения моделируется как функция относительной скорости и давления, и принята, чтобы быть суммой Стрибека, Кулона, и вязких компонентов. Кулонова сила трения состоит из силы предварительной нагрузки, вызванный изоляцией сжимают во время блока и силы, пропорциональной давлению. Сумма сил трения Кулона и Стрибека в нулевой скорости часто упоминается как отколовшаяся сила трения. Для получения дополнительной информации смотрите страницу с описанием блока Translational Friction.
Сила трения аппроксимирована со следующими уравнениями:
где
| F | Сила трения |
| ФК | Кулоново трение |
| PR F | Предварительно загрузите силу |
| f cfr | Кулонов коэффициент трения |
| p A, p B | Давления в цилиндрических камерах |
| Кирпич K | Отколовшееся трение обеспечивает коэффициент увеличения |
| c v | Коэффициент перехода |
| v | Относительная скорость в контакте |
| VFR f | Вязкий коэффициент трения |
Чтобы избежать разрыва в v = 0, небольшая область |v | ≤ v th введена вокруг нулевой скорости, где сила трения принята, чтобы быть линейно пропорциональной скорости:
где
| K | Коэффициент пропорциональности |
| v th | Скоростной порог |
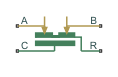
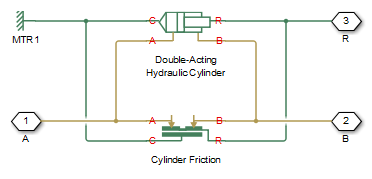
Связи R и C являются механическими переводными портами сохранения, сопоставленными со стержнем и случаем, соответственно. Связи A и B являются гидравлическими портами сохранения, которые будут соединены с портами A и B цилиндрической модели, как показано на следующем рисунке. Сила, сгенерированная блоком всегда, выступает против относительного движения между стержнем и случаем.
Сила предварительной нагрузки, вызванная изоляцией, сжимает во время блока. Значением по умолчанию является 10 N.
Кулонов коэффициент трения, который задает пропорциональность между кулоновой силой трения и давлением в цилиндрических камерах. Значением по умолчанию является 1e-6 N/Pa.
Сила трения увеличивается по кулоновому трению. Кулонова сила трения, умноженная на этот коэффициент, упоминается как отколовшаяся сила трения. Значением по умолчанию является 1.
Коэффициент пропорциональности между вязкой силой трения и относительной скоростью. Значение параметров должно быть больше, чем или равным нулю. Значением по умолчанию является 100 N / (m/s).
Параметр устанавливает значение коэффициента c v, который используется для приближения перехода между отходом и кулоновыми трениями. Его значение присвоено на основе следующих факторов: компонент трения Stribeck достигает приблизительно 5% своего установившегося значения в скорости 3/cv и 2% в скорости 4/cv, который позволяет развить аппроксимированные отношения c v ~ = 4/vmin, где min v является относительной скоростью, в которой сила трения имеет свое минимальное значение. По умолчанию c v установлен в 10 s/m, который соответствует минимальному трению в скорости приблизительно 0.4 m/s.
Параметр устанавливает маленькую близость около нулевой скорости, в которой сила трения считается линейно пропорциональной относительной скорости. MathWorks рекомендует, чтобы вы использовали значения в области значений между 1e-6 и 1e-4 m/s. Значением по умолчанию является 1e-4 m/s.
Используйте вкладку Variables, чтобы установить приоритет и начальные целевые значения для основных переменных до симуляции. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Основных переменных (Simscape).
Блок имеет следующие порты:
AГидравлический порт сохранения, соединенный с цилиндром, вставляется.
BГидравлический порт сохранения соединяется с цилиндрическим выходом.
RМеханический переводный порт сохранения сопоставлен с цилиндрическим стержнем.
CМеханический переводный порт сохранения сопоставлен с цилиндром зажимную структуру.
Гидравлический цилиндр двойного действия | Гидравлический цилиндр одностороннего действия
