Вращательная связь между двумя валами автомобильной трансмиссии
Couplings & Drives

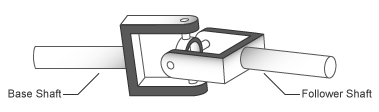
Этот блок представляет вращательную связь между двумя валами автомобильной трансмиссии. Связывающиеся передачи закручивают между валами, таким образом, они вращаются как модуль при прикладной загрузке. Две вращательных степени свободы, внутренние к связи, позволяют валам соединяться под углом. Этот перекрестный угол отличается согласно входу физического сигнала от порта A. Соответствие, смоделированное как параллельный набор пружинного демпфера, позволяет связи деформироваться при загрузке.
Можно использовать блок Universal Joint в качестве связи между двумя вращательными компонентами автомобильной трансмиссии — например, между управлением и управляемыми валами в автомобильном train диска.
Отношение вала угловые скорости зависит от двух параметров: перекрестный угол между этими двумя валами и углом поворота основного вала. Вход физического сигнала обеспечивает перекрестный угол, в то время как параметр диалогового окна обеспечивает начальный основной угол вала. Эти два угла фиксируют отношение двух валов угловые скорости согласно нелинейному уравнению:
где:
ωF является угловой скоростью вала последователя о его оси длины.
ωB является угловой скоростью основного вала о его оси длины.
θB является углом поворота основного вала о его оси длины.
A является перекрестным углом между основой и валами последователя об основном контакте вала.
Две схематики в фигуре иллюстрирует параметры уравнения. В каждом схематичном, левый вал представляет основной вал, в то время как правильный вал представляет вал последователя. Правильные схематические показы связь, замеченная в левом схематическом после валов, вращают 90 ° о своих осях длины (сегменты пунктирной линии).
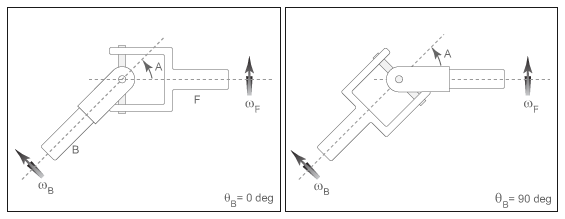
В фигуре перекрестный угол является углом между этими двумя валами о контакте основного вала. Абсолютное значение этого угла должно упасть в области значений 0≤A<Maximum intersection angle. Основной угол вала является углом основного вала о его оси длины. Основной угол вала является также интегралом времени основного вала угловая скорость, ωB.
Максимальное пересечение поворачивает, соединение позволяет. Этот угол измеряет вращение между основой и валами последователя об основном контакте вала. Значение этого угла должно упасть в range0 ≤ A < pi/2. Из выпадающего списка выберите физическую единицу измерения. Значение по умолчанию является радом pi/4.
Линейная пружинная жесткость соединения. Пружинная жесткость составляет эластичное аккумулирование энергии в соединении из-за существенного соответствия. В выпадающем списке выберите физическую единицу измерения. Значением по умолчанию является 1e6 N*m/rad.
Линейный коэффициент затухания соединения. Коэффициент затухания составляет энергетическое рассеяние в соединении из-за существенного соответствия. В выпадающем списке выберите физическую единицу измерения. Значением по умолчанию является 1e3 N*m / (rad/s).
Угол поворота основного вала о его оси длины в нуле времени. Из выпадающего списка выберите физическую единицу измерения. Значение по умолчанию является радом 0.
Закрутите это, основной вал передает валу последователя в нуле времени. Этот крутящий момент определяет начальное состояние существенного соответствия в соединении. Установите это значение к большему, чем нуль, чтобы предварительно загрузить валы с крутящим моментом. Изменение этого значения изменяет начальный переходный ответ из-за существенного соответствия. Выберите физическую единицу измерения. Значением по умолчанию является 0 N*m.
| Порт | Описание |
|---|---|
| B | Сохранение вращательного порта сопоставлено с основным валом |
| F | Сохранение вращательного порта сопоставлено с валом последователя |
| A | Входной порт физического сигнала для перекрестного угла |
Ременной привод | Шкив пояса | Цепочечный диск | Гибкий вал | Барабан веревки
