Система механической передачи с тугим поясом, соединяющим два шкива
Simscape / Автомобильная трансмиссия / Couplings & Drives

Блок представляет пару шкивов, соединенных с гибким плоским поясом или V-образным поясом. Модель составляет трение между гибким поясом и периферией шкива. Если сила трения не достаточна, чтобы управлять загрузкой, модель позволяет промах. Отношение между силами в трудных и свободных ответвлениях соответствует Эйлеровому уравнению. Модель составляет центробежную загрузку в гибком поясе, инерции шкива и переносе трения.
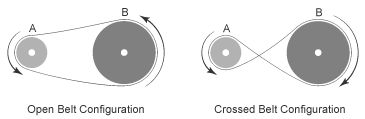
Схематика показывает ременной привод в своих двух возможных настройках: открытый (слева) и пересеченный (справа). В открытой настройке пояса оба шкива имеют тенденцию вращаться в том же направлении, и более крупный шкив имеет тенденцию иметь больший пояс, переносят угол. В пересеченной настройке пояса шкивы имеют тенденцию вращаться в противоположных направлениях, и оба шкива имеют то же самое, переносят угол.
Схематика ременного привода
В открытой настройке угол переноса пояса вокруг каждого шкива дан выражениями:
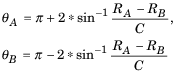
θ A является углом переноса шкива A.
θ B является углом переноса шкива B.
R A является эффективным радиусом шкива A.
R B является эффективным радиусом шкива B.
C является расстоянием между центрами шкива A и шкива B.
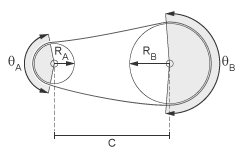
Следующие данные показывают углы переноса и параметры уравнения, используемые в вычислениях открытой настройки.
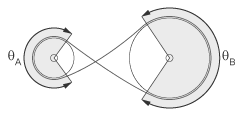
В пересеченной настройке угол переноса пояса вокруг каждого шкива дан следующим выражением. Эти два переносятся, углы равны:
![]()
Данные показывают углы переноса, вычисленные в выражении пересеченной настройки.
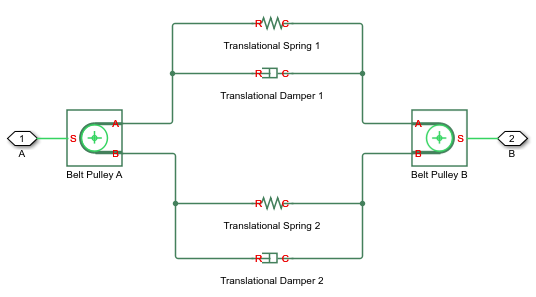
Блок Belt Drive является структурным компонентно-ориентированным на Блоке-полиспасте Пояса Simscape™ Driveline™ и Simscape Переводный Spring и Переводные Демпферы. Переводный Spring и Переводные Демпферы моделируют соответствие пояса. Для уравнений, управляющих динамикой контакта между поясом и шкивом, смотрите страницу с описанием Блока-полиспаста Пояса. Следующие данные показывают блок-схему, на которой базируется блок Belt Drive.
Шкивы не переводят.
Коэффициент трения и скоростной порог трения между поясом и каждым из шкивов являются тем же самым.
Выберите тип ременного привода, который вы хотите смоделировать.
Open belt — (Значение по умолчанию)
Crossed belt
Для схематики этих двух типов дисков смотрите Схематику Ременного привода
Тип гибкого элемента смоделирован.
Flat belt — (Значение по умолчанию)
V-belt — Представляет параметры Number of V-belts и V-belt sheave angle.
Угол Sheave V-пояса. Значением по умолчанию является 30 deg.
Параметр V-belt sheave angle видим только, когда параметром Belt type является V-belt.
Количество параллельных V-поясов. Значением по умолчанию является 1.
Значения нецелого числа округлены к самому близкому целому числу. Увеличение числа поясов увеличивает силу трения, эффективная масса на единицу длины и максимальная допустимая сила.
Параметр Number of V-belts видим только, когда параметром Belt type является V-belt.
Выберите, включать ли эффекты центробежной силы. Если включено, центробежная сила насыщает приблизительно к 90% значения силы на каждом конце пояса. Опции:
Do not model centrifugal force - Suitable for HIL simulation — Опция по умолчанию, которая не включает центробежные вклады силы.
Model centrifugal force — Представляет параметр Belt mass per unit length для конфигурирования центробежного вклада силы.
Линейная плотность каждого пояса. Значением по умолчанию является 0.6 kg/m.
Модель использует это значение, чтобы вычислить центробежную загрузку. Этот параметр включен, только если вы выбираете Model centrifugal force для параметра Centrifugal force.
Эффективная жесткость пояса. Значением по умолчанию является 1e+4 N/m.
Эффективное затухание пояса. Значением по умолчанию является 1000 N/(m/s).
Натяните в поясе, когда пояс и шкивы будут в покое. Значение должно быть положительным. Значением по умолчанию является 100 N.
Задает, выдает ли блок утверждение, когда натяжение ремня является слишком большим.
No maximum tension — (Значение по умолчанию)
Specify maximum tension — Выдает утверждение, когда натяжение ремня слишком высоко. Представляет параметр Belt maximum tension.
Максимальная допустимая сила для каждого пояса. Значением по умолчанию является 1e+5 N.
Когда сила на любом конце пояса встречает или превышает это значение, концы симуляции с ошибкой.
Параметр Belt maximum tension видим только, когда параметром Maximum tension является Specify maximum tension.
Чтобы задать характеристики шкива, присоединенного к порту A, выберите вкладку Pulley A. Чтобы задать характеристики шкива, присоединенного к порту B, выберите вкладку Pulley B.
Радиус шкива. Значением по умолчанию является 0.15 m.
Вязкое трение сопоставило с подшипниками, которые содержат ось шкива. Значением по умолчанию является 0 N*m/(rad/s).
Задает ли модели блока вращательная инерция шкива.
No inertia — (Значение по умолчанию)
Specify inertia and initial velocity — Модели вращательная инерция. Представляет параметры Pulley initial velocity и Pulley inertia.
Вращательная инерция шкива. Значением по умолчанию является 0.01 kg*m^2.
Параметр Pulley inertia видим только, когда параметром Inertia является Specify inertia and initial velocity.
Начальная вращательная скорость шкива. Значением по умолчанию является 0 rad/s.
Параметр Pulley initial velocity видим только, когда параметром Inertia является Specify inertia and initial velocity.
Чтобы задать характеристики контакта, выберите вкладку Contact.
Радиус шкива. Значением по умолчанию является 0.3 m.
Вязкое трение сопоставило с подшипниками, которые содержат ось шкива. Значением по умолчанию является 0.001 N*m/(rad/s).
Задает ли модели блока вращательная инерция шкива.
No inertia — (Значение по умолчанию)
Specify inertia and initial velocity — Модели вращательная инерция. Представляет параметры Pulley initial velocity и Pulley inertia.
Вращательная инерция шкива. Значением по умолчанию является 0.03 kg*m^2.
Параметр Pulley inertia видим только, когда параметром Inertia является Specify inertia and initial velocity.
Начальная вращательная скорость шкива. Значением по умолчанию является 0 rad/s.
Параметр Pulley initial velocity видим только, когда параметром Inertia является Specify inertia and initial velocity.
Чтобы задать характеристики контакта, выберите вкладку Contact.
Кулонов коэффициент трения между поясом и поверхностью шкива. Значением по умолчанию является 0.5.
Задает, вычисляет ли блок угол переноса пояса на шкивах с помощью радиусов шкива, центрального разделения и типа дисков или если углы переноса заданы непосредственно. Опции:
Specify pulley center separation — (Значение по умолчанию) блок вычисляет угол переноса пояса на шкивах с помощью радиусов шкива, центрального разделения и типа дисков.
Представляет параметр Pulley center separation.
Specify wrap angles — Использует углы переноса, которые вы задаете.
Представляет параметры Pulley B wrap angle и Pulley A wrap angle.
Расстояние между центрами шкивов. Значением по умолчанию является 0.5 m.
Параметр Pulley center separation видим только, когда параметром Wrap angle calculation является Specify pulley center separation.
Краевой угол между поясом и шкивом, присоединенным к порту A. Значением по умолчанию является 145 deg.
Параметр Pulley A wrap angle видим только, когда параметром Wrap angle calculation является Specify wrap angles.
Краевой угол между поясом и шкивом, присоединенным к порту B. Значением по умолчанию является 215 deg.
Параметр Pulley B wrap angle видим только, когда параметром Wrap angle calculation является Specify wrap angles.
Относительная скорость требуется для пикового кинетического трения в контакте. Скоростной порог трения улучшает числовую устойчивость симуляции путем гарантирования, что сила непрерывна, когда направление скорости изменяется. Значением по умолчанию является 0.001 m/s.
Для оптимальной производительности симуляции, набор Belt> параметр Centrifugal force к Do not model centrifugal force - Suitable for HIL simulation.
