Вал с крутильным и изгибающимся соответствием
Simscape / Автомобильная трансмиссия / Couplings & Drives

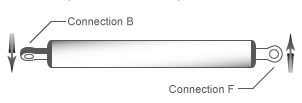
Блок Flexible Shaft представляет вал автомобильной трансмиссии с крутильным и изгибающимся соответствием. Вал состоит из гибкого материала, который скручивает в ответ на прикладной крутящий момент и изгибы в ответ на статический массовый дисбаланс. Действие скручивания задерживает механическую передачу между концами вала, изменяя динамический ответ системы автомобильной трансмиссии.
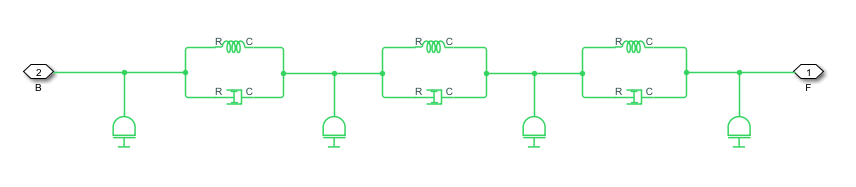
Чтобы представлять гибкий вал скрученности, блок использует модель сосредоточенного параметра. Эта модель делит вал на различные элементы, которые соединяют через параллельные пружинные системы демпфера. Элементы обеспечивают инерцию вала, в то время как пружинные системы демпфера обеспечивают соответствие вала.
Вы задаете инерцию вала, соответствие и количество элементов вала непосредственно в диалоговом окне блока. Выбирая из двух параметризации, можно задать соответствие вала при помощи жесткости и значений затухания или при помощи модуля сдвига вала. Дополнительный параметр позволяет вам смоделировать потери мощности из-за вязкого трения в концах вала. Для получения дополнительной информации см. Крутильную Модель.
Чтобы представлять гибкий вал изгиба, блок использует ваш выбор модели сосредоточенного параметра или eigenmodes модели. В то время как подход сосредоточенного параметра более прост сконфигурировать, подход eigenmodes имеет тенденцию моделировать быстрее. Для получения дополнительной информации об обеих моделях см. Изгибающуюся Модель.
Для модели сосредоточенного параметра количество изгибающихся элементов вала совпадает с количеством элементов вала скрученности, и дополнительные параметры позволяют вам смоделировать линейное затухание, пропорциональное инерции вала и в концах вала. Модель делит вал на различные элементы. Элементы обеспечивают инерцию вала, в то время как матрицы жесткости обеспечивают соответствие вала.
eigenmodes модель вычисляет эффективные массовые пружинные системы демпфера, которые представляют изгибающиеся режимы вала. Можно задать количество режимов, чтобы включать, и дополнительные параметры позволяют вам смоделировать линейное затухание, пропорциональное модальной массе и жесткости.
Для обеих моделей вы задаете соответствие изгиба вала или при помощи изгиба жесткости и линейной массовой плотности или при помощи модуля Янга. Дополнительные параметры включают вам к модели:
Типы монтирования вала. Опции являются идеальным зажимом, контактом, свободным, или жесткость переноса.
Местоположения и инерция или твердых масс точки или дисков, которые присоединены к валу.
Местоположения, значения и угловые смещения статических дисбалансов на вале.
Поскольку два подхода моделирования отличаются, сходимость между ними предоставляет уверенность их результатам. Методические рекомендации должны проверить соглашение для сосредоточенного параметра и eigenmodes ответов при помощи значений параметров из вашей собственной модели гибкого вала в Вале с Крутильным и Поперечным примером Гибкости. Затем для более быстрой симуляции вашей собственной модели используйте подход eigenmodes.
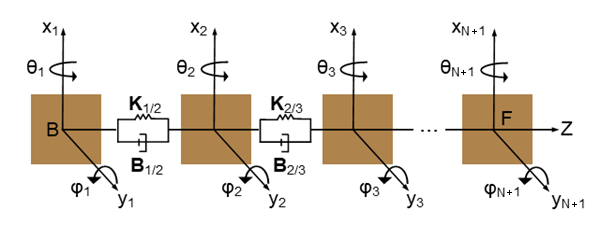
Для крутильной модели блок Flexible Shaft аппроксимирует распределенные, непрерывные свойства вала моделью сосредоточенного параметра. Модель содержит конечное число, , из смешанных ослабленных инерцией пружинных элементов последовательно, плюс итоговая инерция. Результатом является серия инерция, соединенная вращательные пружины и вращательные демпферы.
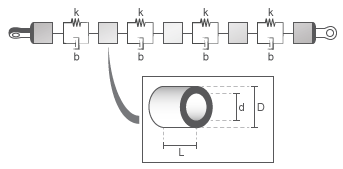
Эквивалентная физическая сеть содержит сегменты, каждый состоящий из пружины, демпфера и инерции. Сегмент представляет короткий раздел карданного вала, пружина представляет крутильное соответствие, и демпфер представляет существенное затухание. Общая инерция вала разделена в части, и распределенный равномерно вдоль вала.
Блок может также включать вязкое трение в концы вала (основа и порты последователя), чтобы представлять несущие убытки в этих точках.
Вязкое трение в концах вала отличается от внутреннего существенного затухания, которое соответствует потерям, возникающим в самом материале вала.
Можно параметризовать крутильную модель с помощью или жесткости k и инерцию J или размерностей и свойств материала вала.
Жесткость вала и инерция вычисляются из размерностей вала и свойств материала этими отношениями:
Где:
JP является полярным моментом инерции вала.
D является наружным диаметром вала.
d является внутренним диаметром вала. Для твердого вала, . Для кольцевого вала, .
L является длиной вала.
m является массой вала.
J является моментом инерции вала.
ρ является плотностью материала вала.
G является модулем сдвига эластичности материала вала.
k является валом вращательная жесткость.
Для любой крутильной параметризации внутреннее существенное затухание задано отношением затухания, c, для модели одно сегмента. В этом случае крутящий момент затухания . Незатухающая собственная частота . Затухание, примененное через отдельный сегмент сегментированной модели, равно продукту коэффициента затухания и относительной вращательной скорости того сегмента.
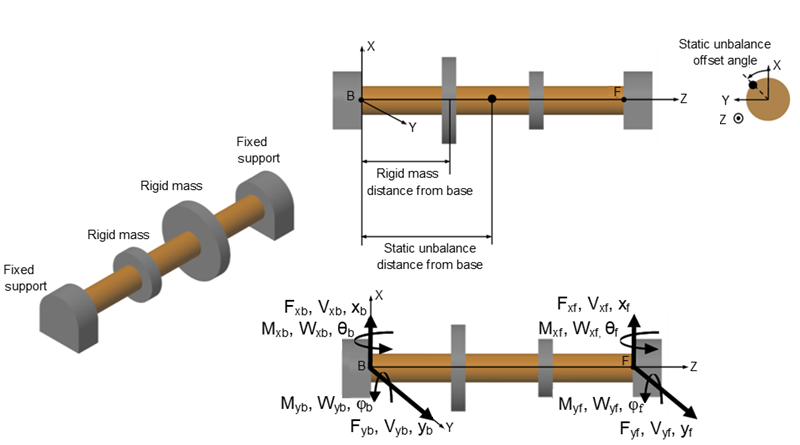
Следующие данные показывают, как измериться:
Статический дисбаланс сместил угол, который является углом статического дисбаланса об оси вала относительно оси x.
Расстояния твердой массы и статического дисбаланса, относительно основы, B.
В фигуре вал зафиксировал поддержки в основе и последователе. Вал проявляет силы, F, и моменты, M, на поддержках. Переводная скорость, V, и вращательная скорость, W, основы и концов последователя относительно их соответствующих поддержек. Все кривые стрелки и соглашения знака следуют за правилом правой руки. Знаки физических сигналов, что блок выходные параметры соответствует стрелкам, которые представляют силы, моменты и скорости вала, действующего на поддержки.
Векторные сигналы:
Сила, Fr = [Fxb, Fyb, Fxf, Fyf]
Момент, M = [Mxb, Myb, Mxf, Myf]
Переводная скорость, V = [Vxb, Vyb, Vxf, Vyf]
Вращательная скорость, W = [Wxb, Wyb, Wxf, Wyf]
Силы вала фиксированной поддержки, моменты и фазы
Дифференциальные уравнения с частными производными, управляющие изгибающимся движением вращающегося вала с точками статического массового дисбаланса, могут быть решены с помощью подхода сосредоточенного параметра или подхода eigenmodes. Для обеих моделей существует два определяющих уравнения:
Где:
жесткость изгиба вала.
вал линейная массовая плотность.
статический дисбаланс.
начальное угловое смещение статический дисбаланс.
количество статических дисбалансов.
скорость вращения вала.
мгновенный угол поворота вала.
координата вдоль оси вала.
отклонения изгиба вала в перпендикуляре направления x к оси вала.
отклонения изгиба вала в перпендикуляре направления y к оси вала.
Как модель скрученности, подход сосредоточенного параметра для изгибающейся модели дискретизирует распределенные, непрерывные свойства вала в конечное число, , из сегментов вала. сегменты вала соответствуют смешанная инерция, соединенная последовательно путем затухания и пружинные элементы. Однако для изгибающейся модели, каждая масса имеет четыре степени свободы: перевод и вращение и в x и в перпендикуляре направлений y к оси вала.
Уравнение сосредоточенного параметра [1] из движения
Где:
матрица, которая представляет массу вала.
вектор, который представляет степени свободы для всех узлов, таких что степени свободы для и узлы
матрица для пружинной жесткости.
матрица для постоянного затухания.
вектор, который представляет внешние силы из-за приложения статического массового дисбаланса.
Уравнение для большой матрицы [4]
Где:
большая матрица для отдельного сегмента вала. Для каждого сегмента вала, половины массы и момент инерции передается узлам в обоих концах сегмента. матрица имеет ненулевые элементы в строки и столбцы:
Где:
длина сегмента вдоль оси вала. зависит от обоих длина вала, , и количество сегментов, , таким образом, что .
масса сегмента. зависит от внешнего, , и внутренний, , диаметры, плотность, , из вала и длины сегмента, такого, что .
![]() , момент массы полусегмента инерции о перпендикуляре оси к оси вала, зависит от массы и длины сегмента, такого что .
, момент массы полусегмента инерции о перпендикуляре оси к оси вала, зависит от массы и длины сегмента, такого что .
суммированные большие матрицы твердых масс, концентрически присоединенных к валу.
Массовые свойства каждой твердой массы, концентрически присоединенной к валу, добавляются к самому близкому узлу, , таким образом, что
где массовый диаметральный момент инерции о перпендикуляре оси к валу для![]() диска.
диска.
Уравнение для матрицы затухания
Где:
затухание, постоянное пропорциональный массе.
коэффициенты затухания перевода в основе, B, и последователе, F.
коэффициенты затухания вращения в основе, B, и последователе, F.
счета на гироскопические эффекты любых концентрически присоединенных дисков, и заданы как
где массовый полярный момент инерции об оси вала для![]() диска.
диска.
Уравнение для матрицы жесткости переноса
Где:
матрица жесткости сегмента вала для отдельного сегмента вала. Матрица жесткости для сегмент вала, между и узлы, имеет ненулевые элементы в строки и столбцы, такие, что
Где:
длина сегмента.
жесткость вала.
матрицы жесткости переноса в основе, B, применился к первому узлу, такому что
Где:
основная переводная жесткость в направлениях y и x.
основная вращательная жесткость о направлениях y и x.
матрицы жесткости переноса в последователе, F, применился к первому и![]() узлу, такому что
узлу, такому что
Где:
последователь переводная жесткость в направлениях y и x.
последователь вращательная жесткость о направлениях y и x
Основа и последователь, переносящий матрицы жесткости, и , являются ненулевыми, только если вы выбираете Bearing matrix для параметра Base (B) mounting type или параметра Follower (F) mounting type, соответственно. Если вы выбираете тип монтирования Clamped, кинематические условия нулевого вращения и перевода применяются к первым или последним четырем строкам в уравнении сосредоточенного параметра движения. Если вы выбираете тип монтирования Pinned, кинематические условия нулевого перевода применяются к основе узлов последователя в уравнении сосредоточенного параметра движения.
| Узел | Монтирование типа | Граничное условие для уравнения сосредоточенного параметра |
|---|---|---|
| Основа, B | Clamped | |
Pinned | ||
Bearing Matrix | нетривиальны. | |
| Последователь, F | Clamped | |
Pinned | ||
Bearing Matrix | нетривиальны |
Внешние силы из-за каждого статического массового дисбаланса прикладываются к самому близкому узлу. Принуждение в узел
Где:
расстояние статический дисбаланс от самого близкого узел вдоль оси вала.
статический дисбаланс.
угол сосредоточенного параметра скрученности для узел.
Для подхода eigenmodes блок вычисляет изгибающиеся свойства режима вала в течение времени компиляции и затем моделирует модальные эффективные массовые пружинные системы демпфера с помощью этих шагов:
Определите формы eigenmode путем обработки отклонения каждого сегмента гибкого вала между твердыми массами как пространственная функция с неизвестными коэффициентами:
Сгенерируйте уравнения для граничных условий сегмента гибкого вала.
Численно решите систему уравнений для модальных частот.
Определите форму режима на каждой модальной частоте с помощью нелинейного метода наименьших квадратов.
Если вы вводите формы режима непосредственно, блок пропускает этот шаг.
Определите эти динамические свойства для каждого eigenmode:
Эффективная модальная масса
Жесткость
Принуждение коэффициентов
Моделируйте независимые ответы эффективной массовой пружинной системы демпфера для каждого eigenmode.
Получите общий ответ вала путем подведения итогов отклонений каждого eigenmode. Загрузки в поддержках пропорциональны пространственным производным форм режима.
Уравнения для каждого шага в подходе eigenmodes показывают. Для получения информации о деривации уравнений смотрите Muszynska[5], Рао [6], и Ву [7].
Следующие данные показывают углы отклонения и переменные, что использование блока, чтобы решить eigenmodes приближается к уравнениям граничного условия.
Соседние сегменты вала и твердое дисковое движение
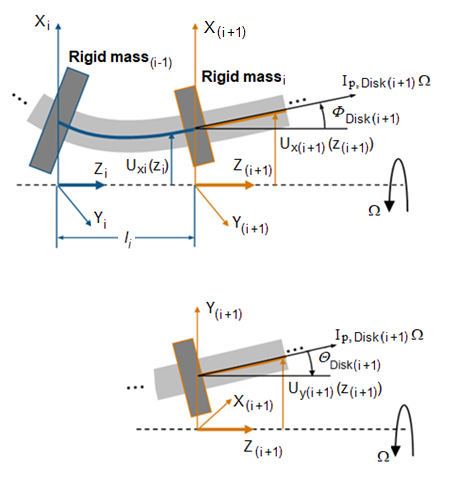
На шаге 1, чтобы решить для eigenmodes, блок рассматривает добровольные уравнения изгиба для луча в этих двух перпендикулярах направлений к оси вала, с помощью этих уравнений:
Блок принимает, что решения этих двух уравнений имеют эту форму:
Где:
отклонение формы режима в направлении x.
отклонение формы режима в направлении y.
.
модальная частота.
коэффициенты.
жесткость изгиба вала.
вал линейная массовая плотность.
В eigenmodes приближаются к уравнениям, указывает на производную относительно , ось вдоль вала, такого, что:
указывает на первую производную относительно .
указывает на вторую производную относительно .
указывает на третью производную относительно .
На шаге 1a, чтобы сгенерировать уравнения для граничных условий сегмента гибкого вала, блок делит вал на сегменты между валом заканчиваются и твердые массы присоединяются к валу. Для каждого сегмента блок задает форма режима кусочным способом вдоль целого вала как и .
Для каждого отдельного сегмента вала, , формы режима, и , заданы решениями добровольных уравнений изгиба. Для каждого сегмента вала, , относится к источнику в конце сегмента, самом близком к основе вала, B, концу.
Каждая форма режима сегмента вала имеет восемь неизвестных коэффициентов, . Формы режима и удовлетворите граничные условия в дисковых интерфейсах и в обоих концах вала.
Граничные условия зависят от монтирующихся типов и применяются к обеим формам режимов. Граничные условия в основном конце вала применяются к первому сегменту. Граничные условия в конце последователя вала применяются к сегменту .
Уравнения в вале B и концы F
| Узел | Монтирование типа | Уравнение граничного условия |
|---|---|---|
| Основа, B | Clamped — Нулевое отклонение и наклон |
|
Pinned — Нулевое отклонение и момент |
| |
Free — Нулевой момент и сила |
| |
Bearing Matrix — С переносом матрицы жесткости | Где:
| |
| Последователь, F | Clamped — Нулевое отклонение и наклон |
|
Pinned — Нулевое отклонение и момент |
| |
Free — Нулевой момент и сила |
| |
Bearing Matrix — С переносом матрицы жесткости | Где:
|
В каждой твердой массе сегмент вала по обе стороны от твердой массы должен удовлетворить непрерывность в смещении и наклоне и равновесии сил и моменты. Чтобы удовлетворить граничные условия, блок использует уравнения в таблице.
Уравнения в твердых массах, концентрически присоединенных к валу
| Условие | Твердые массы концентрически присоединяются к валу | |
|---|---|---|
| Масса точки | Диск | |
| Непрерывность смещения |
| |
| Наклонная непрерывность |
| |
| Обеспечьте баланс |
| |
| Баланс момента |
|
|
Переменные для уравнений в этой таблице:
номинальная скорость вращения вала в средней точке вала.
твердый массовый полярный момент инерции об оси вала.
модальная частота.
твердый массовый диаметральный момент инерции об оси вала.
жесткость изгиба вала.
На шаге 1b блок численно решает для модальных частот путем объединения граничных условий сегмента вала в вале B и концах F с граничными условиями сегмента вала в твердых массах, концентрически присоединенных к валу. Получившееся уравнение, в матричной форме,
Где:
содержит модальные коэффициенты для сегменты вала, такие, что
Для нетривиальных модальных решений должна удовлетворить система уравнений .
Определить модальные решения для частоты численно, блок:
Вычисляет начальные решения для собственной частоты, , путем взятия локальных минимумов , где:
разрешение поиска собственной частоты.
максимальная рассмотренная собственная частота.
Блок совершенствовал каждого заменяя его на минимум
Блок затем использует нелинейный метод наименьших квадратов, чтобы определить коэффициенты формы режима на каждой модальной частоте.
На шаге 2 блок определяет эти eigenmode свойства динамики:
Модальная масса
Модальная жесткость
Модальное затухание
Модальные коэффициенты принуждения
Блок уменьшает динамику каждого режима, , к независимой системе уравнений:
Где:
зависящий от времени коэффициент режим в направление.
зависящий от времени коэффициент режим в направление.
Уравнения для модальная масса:
Уравнения для модальная жесткость:
Где:
L является длиной вала.
и только используются, когда контур вала задан матрицей переноса.
Только строки, которые способствуют загрузке в каждом модальном направлении, играют роль в модальном выражении жесткости того направления.
Уравнения для модального затухания из-за диска полярный момент инерции:
Уравнения для диссипативного модального затухания:
Где:
затухание, постоянное пропорциональный массе.
затухание, постоянное пропорциональный жесткости.
Уравнения для модального принуждения из-за массовых статических дисбалансов:
Где:
Силы каждого статического дисбаланса, , суммированы для общей силы на режим.
мгновенная скорость вращения в средней точке вала.
мгновенный угол в средней точке вала.
начальный угол excitational статический дисбаланс.
На шаге 4 блок суммирует отклонения каждого eigenmode, чтобы получить общий ответ вала. Уравнения для общего мгновенного отклонения вдоль вала:
Уравнения для мгновенной силы, действующей на поддержки в вале B и концы F в x и направлениях y:
Уравнения в течение мгновенного момента, действуя на поддержки в концах вала:
Чтобы увеличить точность симуляции для подхода сосредоточенного параметра для крутильной или изгибающейся модели, увеличьте число сегментов![]() . Однако как количество увеличений сегментов, производительность симуляции, которая является скоростью симуляции, может уменьшиться. Одно сегментированная крутильная модель показывает собственную частоту, которая является близко к первой собственной частоте непрерывной модели распределенного параметра.
. Однако как количество увеличений сегментов, производительность симуляции, которая является скоростью симуляции, может уменьшиться. Одно сегментированная крутильная модель показывает собственную частоту, которая является близко к первой собственной частоте непрерывной модели распределенного параметра.
Для большей точности можно выбрать 2, 4, 8, или больше сегментов. Например, четыре самых низких крутильных собственных частоты представлены с точностью до 0,1, 1.9, 1.6, и 5,3 процентов, соответственно, 16 сегментированной моделью.
Чтобы увеличить точность симуляции для eigenmodes приближаются к изгибающейся модели:
Проверьте, что параметр Nominal shaft speed for bending modes близко к скорости вала симуляции. Этот параметр может влиять на образцовые результаты, если вы параметризовали твердую массу, присоединенную к валу с большим массовым моментом инерции об оси вала.
Уменьшите значения параметров Eigenfrequency refine factor и Eigenfrequency search resolution. Сокращение этих значений может увеличить точность модальных частот и форм.
Уменьшите константы затухания. Вычисления Simscape™ модальных свойств перед симуляцией не составляют затухание.
Подкачайте значения для основы, B и последователя, F, параметров граничного условия и инвертируйте блок в модели Simscape. Формы Eigenmodes зависят от функций дубинки и sinh. Поэтому ошибки могут произойти около конца F.
Проверяйте чувствительность к параметрам Advanced Bending при помощи ваших параметров в модели гибкого вала в Вале с Крутильным и Поперечным примером Гибкости. Настройте параметры и используйте ссылки, обеспеченные в примере, чтобы исследовать, как значения влияют на eigenmode частоты и формы. Настройте значения параметров в своей модели соответственно.
Увеличьте значения параметров Limit number of modes и Eigenfrequency upper limit. Самая высокая модальная частота в симуляции должна быть достаточно больше, чем частота вращения вала.
Модель распределенного параметра непрерывного крутильного вала аппроксимирована конечным числом, , из сосредоточенных параметров.
Гибкий вал имеет постоянное осесимметричное поперечное сечение вдоль своей длины.
Вращение вала и гибкость скрученности волнуют изгиб вала, но изгиб не влияет на вращение вала и гибкость скрученности.
Твердые массы точки или диски, присоединенные к валу, имеют тонкие длины, параллельные оси вала.
Для eigenmodes изгибающаяся модель затухание не влияет на собственные частоты.
Переносящие поддержки расположены в конечных точках вала.
Изгиб вала не передается между блоками Гибкого вала.
Относительно длины вала наружный диаметр вала является небольшим. Отношение длины вала к наружному диаметру больше, чем 20.
Относительно длины вала изгибающееся отклонение является маленьким.
Статические массовые дисбалансы являются единственными изгибающими вал внешними увлекательными загрузками.
Поддержки вала являются стационарными.
Гироскопические эффекты твердых дисков рассматриваются; пропускают гироскопическими эффектами самого вала.
Статическое массовое принуждение дисбаланса в подходе eigenmodes использует скорость вращения в средней точке вала.
Чтобы удовлетворить режим вала формируют проблему граничных условий, блок использует алгоритм Levenberg-Marquardt.
[1] Адамс, M.L., вращение вибрации машинного оборудования. КРК-Пресс, Нью-Йорк, 2010.
[2] Купайтесь, K. J. процедуры конечного элемента. Prentice Hall, Inc, Соединенные Штаты, 1996.
[3] Chudnovsky, V., Кеннеди, D, Мукерджи, A. и Wendlandt, J., моделируя гибкие тела в SimMechanics и Simulink. Обзор MATLAB, 14 (3), май 2006,
[4] Миллер, S., Соарес, T., Ван Веддинджен, Y., Wendlandt, J., моделируя гибкие тела с Simscape Multibody. MathWorks, 2017.
[5] Muszynska, A., Rotordynamics, Taylor & Francis, 2005
[6] Рао, судно, вибрация непрерывных систем. John Wiley & Sons, Хобокен, NJ, 2007.
[7] Ву, J.S., Лин, F.T., Шоу, H.J., аналитическое решение для кружения скоростей и форм режима вала распределенной массы с произвольными твердыми дисками. Журнал ASME прикладной механики, объем 81, 2014.
Инерция | Стержень | Вращательный демпфер | Вращательный Spring | Крутильный пружинный демпфер


