

Датчик раньше измерял силу реакции и крутящий момент между двумя ограниченными или управляемыми телами
Первое поколение/Sensors & Actuators
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Constraint & Driver Sensor измеряет силу/крутящий момент ограничения (сила/крутящий момент реакции) между парой тел. Вы соединяете этот блок с Ограничением или Блоком драйверов, соединенным между этими двумя Телами. Выходной сигнал является силой/крутящим моментом реакции.
Constraint & Driver Sensor измеряет силу/крутящий момент реакции в системе координат привязки (CS), заданный в диалоговом окне блока. Ограничение или Блок драйверов соединяют основу и Тело последователя. Вы принимаете решение в диалоговом окне измерить силу/крутящий момент реакции или на основе или на Теле последователя.
Вход является портом коннектора, соединенным с Ограничением или Блоком драйверов, который вы хотите обнаружить. Выходной порт является набором сигналов Simulink® или одним связанным Сигналом Simulink вектора (векторов) силы/крутящего момента реакции.
Не все компоненты выходного сигнала силы/крутящего момента реакции являются значительными. Только те компоненты, спроектированные в подпространство степеней свободы, ограниченных или управляемых связанным Ограничением или Блоком драйверов, являются физическими. Компоненты, ортогональные к ограниченным или управляемым степеням свободы, являются нефизическими.
Матрица вращения ориентации тела R связывает векторные компоненты, измеренные в CS тела и в инерционном Мировом CS [R] · v b = v s. Вектор-столбец v b перечисляет три компонента векторного v, измеренные в CS тела. Вектор-столбец v s перечисляет три компонента векторного v, измеренные в Мировом CS.
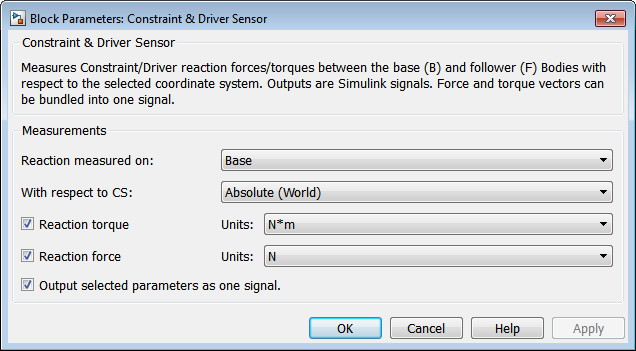
Диалоговое окно имеет одну активную область, Measurements.
В выпадающем меню примите решение измерить силу/крутящий момент реакции на основе (B) или последователь (ф) Боди. Значением по умолчанию является Base.
В выпадающем меню выберите CS, в котором интерпретированы сила/крутящий момент реакции или движение. Значением по умолчанию является Absolute (World).
В случае Absolute векторам силы измерили компоненты относительно инерционных Мировых осей CS. В случае Local те же сигналы вектора силы предварительно умножаются на обратную матрицу вращения R-1 = R T для Тела, выбранного в Reactions measured on.
Установите флажок, если вы хотите измерить крутящий момент реакции. Значение по умолчанию выбрано. Крутящий момент является вектором - строкой в выходном сигнале Simulink.
В выпадающем меню выберите модули для крутящего момента реакции. Значением по умолчанию является N*m (ньютон-метры).
Установите флажок, если вы хотите измерить силу реакции. Значение по умолчанию выбрано. Сила является вектором - строкой в выходном сигнале Simulink.
В выпадающем меню выберите модули для силы реакции. Значением по умолчанию является N (ньютоны).
Установите этот флажок, чтобы преобразовать выходные сигналы в один связанный сигнал. Значение по умолчанию выбрано. Если вы очистите его, блок Constraint & Driver Sensor вырастит столько же выходных портов Simulink, сколько существуют активные выбранные сигналы, один порт для каждого выбранного сигнала.
Если флажок устанавливается, Сигнал Simulink имеет все активные сигналы, связанные в вектор одной строки, упорядоченный в порядке, показанном в диалоговом окне. Тип компонентов сигнала зависит, на котором измерения активны (выбранный).
Датчик выходные параметры упорядочен и маркирован можно следующим образом.
| Constraint & Driver Sensor Output Signal | Метка |
|---|---|
| Крутящий момент реакции | TR |
| Сила реакции | Франк |
Вот Constraint & Driver Sensor, соединенная с Ограничением Механизма, которое соединяется и ограничения два Тела:
Необходимо добавить порт Sensor (порт коннектора) к Ограничению/Блоку драйверов, чтобы соединить Constraint & Driver Sensor с ним. Основа (B) - последовательность последователя (ф) Боди на двух сторонах Соединения определяет смысл данных Constraint & Driver Sensor.
Датчик тела, привод драйвера, объединенный датчик, механическое устройство, переходящее панель
Смотрите представления движения тела и распознающихся движений и сил.