

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Библиотека Simscape Multibody Sensors & Actuators обеспечивает набор блоков Датчика, которые позволяют вам измериться
Движения тела
Совместные движения и силы или крутящие моменты на соединениях
Ограничительные силы реакции и крутящие моменты
Весь Sensor вывод задан относительно фиксированного, обычного “нуля”. Смотрите Домашние Измерения Настройки и Ориентации Положения.
Можно питать Sensor выводом назад в блоки Привода к образцовым пружинам, демпферам и другим механическим устройствам, которые зависят от обратной связи силы. Смотрите Приведение в действие Тела, Приведение в действие Соединения, Добавление Внутренних Сил и Проверку Механических Моделей.
Тело и Объединенные блоки Датчика могут измерить положение и/или ориентацию тел и степеней свободы. Они делают эти измерения относительно домашней настройки машины, состояние машины перед применением начальных приводов условия и блоком демонтированных соединений. Таким образом датчики движения включают эффект последних, которые действуют, прежде чем симуляция запускается.
Для дальнейшего обсуждения смотрите Моделирование Демонтированные Соединения и Определение Исходных положений и Скоростей и состояния Движения Кинематики и Машины.
Обнаруживать положение, скорость или ускорение тела, представленного блоком Body с Датчиком Тела:
Если блок Body не имеет запасной системы локальной координаты с портом Body CS, создает один (см. Системы координат Органа по Управлению).
Перетащите блок Body Sensor от библиотеки Sensors & Actuators в вашу модель.
Соедините его порт коннектора с запасным портом Body CS на Теле.
Откройте диалоговое окно Датчика.
Выберите систему координат, относительно которой датчик измеряет свой вывод из списка With respect to CS.
Установите флажки рядом с движениями, что вы хотите распознаться (см. страницу с описанием блока Body Sensor).
Если вы приняли решение обнаружить больше чем один тип движения и хотеть, чтобы Датчик мультиплексировал движения в один выходной сигнал, установите флажок Output selected parameters as one signal.
Нажмите OK или Apply.
Соедините вывод блока Body Sensor к Simulink® Scope или другому приемнику сигнала или к обратной связи движения, в зависимости от ваших потребностей.
Блок Joint Sensor позволяет вам измерить движения степеней свободы. Это может также измерить относительные силы и крутящие моменты между телами, соединенными с соединением. Они включают вычисленную силу или крутящий момент (сила, или закрутите, должен был воспроизвести движение соединения), и сила реакции и крутящий момент на объединенном примитиве. (Вы не можете измерить вычисленную силу или крутящий момент на сферическом или примитивной сварке.) Необходимо соединить отдельный блок Joint Sensor с блоком Joint для каждого объединенного примитива, который вы хотите обнаружить.
Обнаруживать движения, силы и крутящие моменты объединенного примитива, содержавшего в блоке Joint:
Если блок Joint не имеет запасного порта Sensor, создает один (см. Порты Привода и Датчика Создания на Соединении).
Перетащите блок Joint Sensor от библиотеки Sensors & Actuators в вашу модель.
Соедините его порт коннектора с запасным портом Sensor на соединении.
Используйте диалоговое окно Датчика, чтобы сконфигурировать Датчик, чтобы измерить движения, силы и крутящие моменты, которые вы хотите измерить (см. страницу с описанием блока Joint Sensor).
Соедините вывод блока Joint Sensor к Осциллографу Simulink или другому приемнику сигнала или к обратной связи движения, в зависимости от ваших потребностей.
Блок Constraint & Driver Sensor позволяет вам измерить силы реакции и крутящие моменты, вызванные на ограничениях, смоделированных Ограничением Simscape Multibody и Блоками драйверов.
Обнаруживать силу реакции и/или крутящий момент, вызванный ограничением или драйвером,
Если Ограничение или Драйвер не имеют запасного порта Sensor, создайте тот.
Перетащите блок Constraint & Driver Sensor от библиотеки Sensors & Actuators в вашу модель.
Соедините его порт коннектора с портом Sensor на Ограничении или Блоке драйверов.
Откройте диалоговое окно блока Sensor.
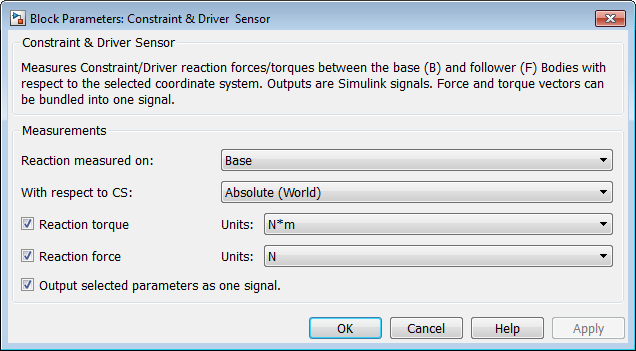
Выберите тело (последователь или основа), на котором можно измерить силу реакции из списка Reactions measured on.
Выберите систему координат, относительно которой Датчик измеряет свой вывод из списка With respect to coordinate system.
Установите флажок Reaction torque, если вы хотите, чтобы Датчик вывел крутящий момент реакции на основе (или последователь) тело.
Установите флажок Reaction force, если вы хотите, чтобы Датчик вывел силу реакции на основе (или последователь) тело.
Если вы приняли решение вывести и силу реакции и закрутить и хотеть, чтобы Датчик мультиплексировал их в один выходной сигнал, установите флажок Output selected parameters as one signal.
Нажмите OK или Apply. Соедините вывод блока Constraint & Driver Sensor к Осциллографу Simulink или другому приемнику сигнала или к обратной связи движения, в зависимости от ваших потребностей.
Не все компоненты силы/крутящего момента реакции являются значительными. Только те компоненты, спроектированные в подпространство ограниченных или управляемых степеней свободы (DoFs), являются физическими. Компоненты, ортогональные к ограниченным или управляемым степеням свободы, не являются физическими.
В этом примере вы управляете телом вдоль x - ось, но только разрешаете ему призматическую степень свободы, наклоненную под углом в плоскости x-y. Создайте следующую модель.
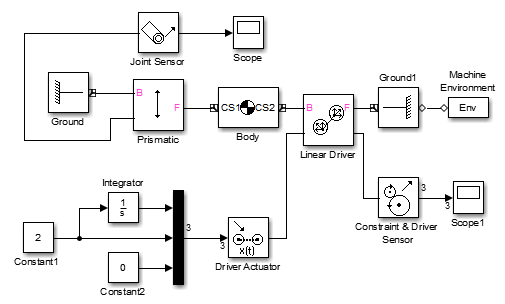
Сконфигурируйте Constraint & Driver Sensor, чтобы измерить только силу реакции, не крутящий момент. Сконфигурируйте Линейный Драйвер, чтобы управлять Телом вдоль Мира x - ось, но настроить Призматическое с примитивной осью вперед (1, 2, 0). Тело может затем переместиться только вдоль этой оси, но управляется вдоль горизонтального x - ось. Измерьте все движения и силы в Мире. Оставьте все другие настройки в значении по умолчанию.
Откройте Осциллографы и запустите модель. Измеренная сила реакции простирается вдоль x - ось со значением-19.62 Н (ньютоны) =-2mg. Поскольку принужденная степень свободы не параллельна x - ось, необходимо спроектировать силу реакции вдоль единичного вектора (1, 2, 0) / определение направления призматического примитива, чтобы получить физическую часть.
Добавьте в модель блоки Simulink, которые формируют скалярное произведение между сигналом силы реакции (три компонента) и призматическим единичным вектором (также три компонента). (Можно задать вектор рабочей области для этой оси и использовать ее и в соединении и в скалярном произведении.) Повторно подключают Scope1, чтобы измерить этот физический компонент силы реакции.
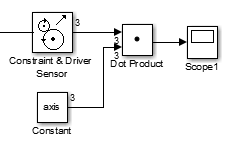
Физический компонент силы реакции - (19,62 Н) · (1/) =-8.77 Н. Компонент реакции обеспечивает ортогональный к (1, 2, 0) не является физическим.