

Примитивное соединение с неправильно выровненной основой и осями последователя, содержащими одну вращательную степень свободы
Первое поколение/Joints/Disassembled Соединения
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Disassembled Revolute представляет сингл вращательные степени свободы (DoF) вдоль пары заданных неправильно выровненных осей между двумя телами. Симуляция Simscape Multibody автоматически собирается (выравнивается), оси вращения при симуляции запускаются, когда это задает собранную настройку машины.
Демонтированные закрученные назад оси последователя (синий) и основной (красный)
Блок Joint представляет относительные степени свободы между двумя телами, не самими телами.
Необходимо соединить любой блок Joint с двумя и только двумя блоками Тела, основой и последователем. Все Соединения имеют значение по умолчанию двух портов коннектора для этих связей, задавая направление совместного движения (основа последователю). Вы соединяете каждую сторону блока Joint к этим блокам Тела в точке системы координат (CS) Тела.
Вы задаете объединенные примитивные оси, если таковые имеются, в Объединенном диалоговом окне. Две демонтированных примитивных объединенных оси сопоставлены, по порядку, с основой и Телами последователя, соответственно.
Вы не можете соединить Привод или Датчик к Демонтированному Соединению.
Этот блок Joint демонтирован: связанные источники CS Тела не должны быть пространственно расположены точки или лежат в промежутке призматических примитивов, если таковые имеются.
Можно только использовать блок Disassembled Joint в замкнутом цикле. Один цикл может иметь не больше, чем одно демонтированное соединение.
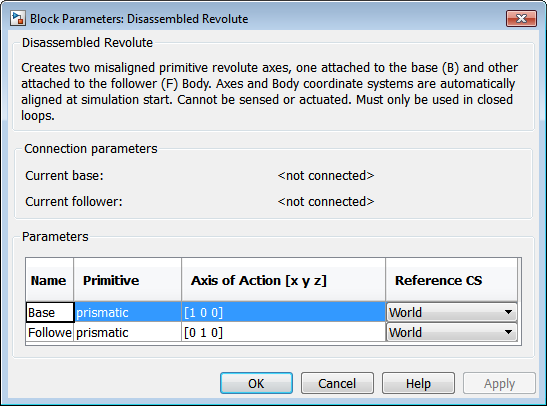
Диалоговое окно имеет две активных области, Connection parameters и Parameters.
Когда вы соединяете основу (B) порт коннектора на блоке Disassembled Revolute к Порту CS Тела на Теле, этот параметр автоматически сбрасывается к имени этого CS Тела. Смотрите следующую фигуру, Демонтированные Закрученные назад Порты Коннектора Тела Основы и Последователя.
Когда вы соединяете последователя (F) порт коннектора на блоке Disassembled Revolute к Порту CS Тела на Теле, этот параметр автоматически сбрасывается к имени этого CS Тела. Смотрите следующую фигуру, Демонтированные Закрученные назад Порты Коннектора Тела Основы и Последователя.
Демонтированные закрученные назад порты коннектора тела основы и последователя

Существует одна вкладка Axes.
Записи на вкладке Axes требуются. Они задают направления двух неправильно выровненных осей вращательной степени свободы, которую представляет Демонтированное Закрученное назад.

Этот столбец автоматически отображает имена двух неправильно выровненных осей вращения, присоединенных к основе и телам последователя, соответственно.
Войдите здесь как два трехкомпонентных вектора две неправильно выровненных направленных оси, о которых соответственно могут вращаться основа и тела последователя. Векторами по умолчанию является [1 0 0] и [0 1 0], соответственно. Оси являются направленными векторами, чьи в целом подписывает вопрос.
Используя выпадающее меню, выберите системы координат (Мир, основной CS Тела или CS Тела последователя), относительно чьих осей координат две векторных оси вращения ориентированы. Значениями по умолчанию является World.
Демонтированный цилиндрический, демонтированный призматический, демонтированный сферический, закрученный назад
Смотрите Степени свободы Моделирования для больше при представлении DoFs с Демонтированными Соединениями.
Смотрите Топологию Модели Проверки и Как работы Simscape Multibody Software для больше при замыкании кругов с демонтированными соединениями.