

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Simulink® обеспечивает обширный набор опций симуляции, которые применяются к любому типу модели. Дополнительные опции применяются в частности к симуляции моделей Simscape Multibody. В этом разделе рассматриваются те стандартные опции Simulink, для которых механические модели требуют специального замечания и дополнительных опций Simscape Multibody, характерных для механических систем.
Уважение различия ввело в Представлении Машин с Моделями, необходимо сделать две категории из настроек, один для каждой машины в модели и один для целой модели Simscape Multibody. Чтобы сконфигурировать механическую модель для симуляции, необходимо взаимодействовать с двумя диалоговыми окнами.
Настройки машины через Блок Среды Машины используют диалоговое окно блока Machine Environment.
Настройки всей модели через Simulink и Интерфейсы Simscape используют диалоговое окно Параметров конфигурации Simulink.
Конфигурирование Методов Решения обсуждает настройки подробно.
Каждая машина в вашей модели требует точно, чтобы один блок Machine Environment был соединен с одним из своих Наземных блоков. Механические настройки, которые вы вводите в тот блок Machine Environment, определяют механическую среду для той машины только. Другими машинами управляют их соответствующие блоки Среды Машины.
Этот блок управляет механической средой подключенной машины, включая динамику симуляции, размерность машины, силу тяжести, допуски, ограничения, аналитические режимы движения и визуализацию. Смотрите страницу с описанием Среды Машины для полного описания диалогового окна блока четыре вкладки.
Параметры среды Машины также представлены в следующих разделах:
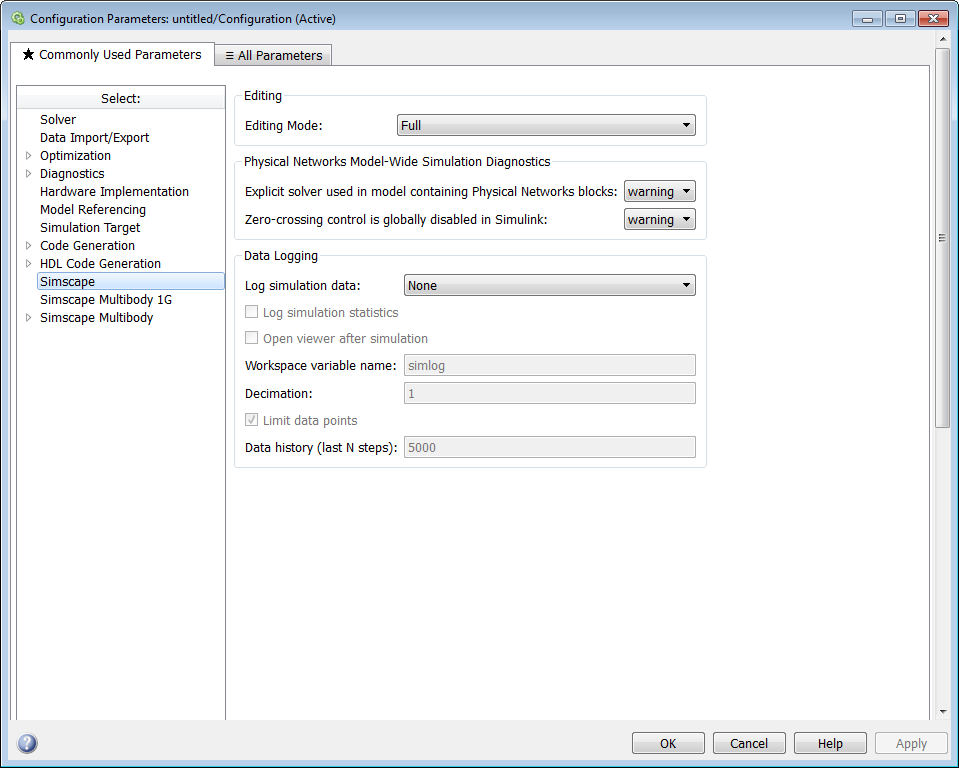
Механические и общие настройки для целой модели расположены в диалоговом окне Параметров конфигурации Simulink, к которому получают доступ через меню Simulink Simulation. Каждый узел в этом диалоговом окне относится к управлению симуляцией вашей модели, включая визуализацию. Дополнительную информацию см. в документации Simulink об этом диалоговом окне.
Как минимум необходимо проверять и возможно настроить настройки в Solver, Simscape и узлах Simscape Multibody 1G, прежде, чем запустить механическую модель:
Активная область Editing узла Simscape позволяет вам выбирать режим редактирования программного обеспечения Simscape. Чтобы изменить эти настройки, смотрите Используя Режим редактирования Simscape.
Специфичные для Simscape Multibody средства управления появляются на узле Simscape Multibody 1G. Это имеет две активных области, Diagnostics и Visualization.
Для больше о конфигурировании диагностики симуляции, смотрите Отказы Симуляции Предотвращения.
Для больше о конфигурировании визуализации, смотрите Подготовку Визуализации.
Выбором и настройкой решателя являются настройки Simulink, расположенные на узле Solver. Этот узел имеет две активных области, Simulation time и Solver options.
Конфигурирование Решателя Simulink содержит основную информацию, чтобы запустить вас.
Чтобы оптимизировать настройки решателя для лучшей симуляции, смотрите Улучшающую Производительность.
Для получения общей информации о решателях Simulink, см. документацию Simulink.
Диалоговое окно параметров конфигурации Simulink (показанный узел Simscape)
Если вам установят продукт Simscape Multibody, то любая модель, которую вы создаете, отобразит узел Simscape Multibody 1G. Однако, если вы затем создадите модель, которая не включает блоков Simscape Multibody, то любые настройки Simscape Multibody не по умолчанию, которые вы устанавливаете в Simscape Multibody 1G, не будут сохранены в той модели. После сохранения, закрытия и повторного открытия модели, настройки Simscape Multibody вернутся к своим значениям по умолчанию.