

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Машина термина Simscape Multibody имеет два значения.
Это относится к физической системе, которая включает по крайней мере одно твердое тело. Библиотека блоков Simscape Multibody позволяет вам создавать модели Simulink® машин.
Это также обращается к топологически отличной и отдельной блок-схеме, представляющей одну реальную машину. Модель может иметь одну или несколько машин.
Этот раздел объясняет природу моделей Simscape Multibody и машин.
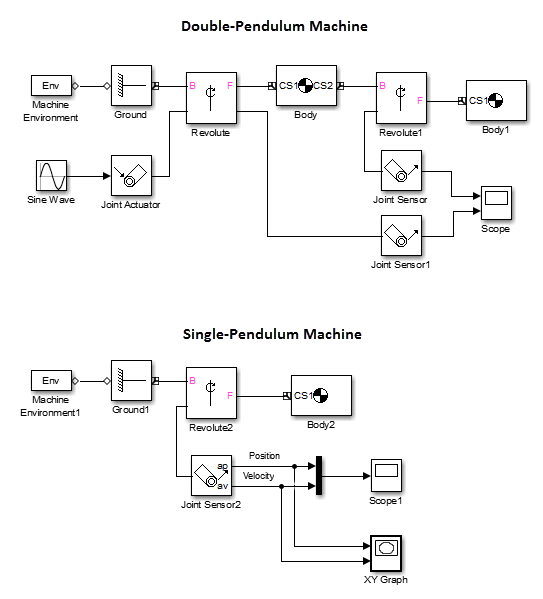
Модель Simscape Multibody состоит из блок-схемы, состоявшей из одной или нескольких машин, каждая из которых является набором связанных блоков, представляющих одну реальную машину. Например, следующая модель содержит две машины.
Модель Simscape Multibody значительно отличается от других моделей Simulink в том, как она представляет машину.
Обычная модель Simulink представляет математику движения машины, т.е. алгебраические и дифференциальные уравнения, которые предсказывают будущее состояние машины от его текущего состояния. Математическая модель позволяет Simulink моделировать машину.
Модель Simscape Multibody представляет физическую структуру машины, массовых свойств и геометрических и кинематических отношений ее тел компонента. Программное обеспечение Simscape Multibody преобразовывает это структурное представление внутренней, эквивалентной математической модели. Это экономит вам время и усилие по разработке математической модели самим.
Вы создаете модель Simscape Multibody почти таким же способом, которым вы создаете любую другую модель Simulink. Во-первых, вы открываете окно модели Simulink. Затем вы перетаскиваете экземпляры Simscape Multibody и других блоков Simulink из библиотек блока Simulink в окно и проводите линии, чтобы соединить блоки (см. Соединяющиеся Блоки Simscape Multibody).
Библиотека блоков Simscape Multibody обеспечивает следующие блоки специально для моделирования машин:
Блоки Среды машины устанавливают механическую среду для машины. Точно один блок Ground в каждой машине должен быть соединен с блоком Machine Environment.
Блоки тела представляют компоненты машины и неподвижную среду машины (земля). Смотрите Территорию Моделирования и Тела.
Объединенные блоки представляют степени свободы одного тела относительно другого тела или к точке на земле. Смотрите Степени свободы Моделирования.
Ограничение и Блоки драйверов ограничивают движения или налагают движения на тела друг относительно друга. Смотрите Ограничение и Управление Степенями свободы.
Блоки привода задают силы, движения, переменные массы и инерцию, или начальные условия применились к телам, соединениям и драйверам. Смотрите Применение Движений и Сил.
Блоки датчика измеряют силы на и движения тел, соединений и драйверов. Смотрите Распознающиеся Движения и Силы.
Обеспечьте блоки элемента образцовые межмассовые силы. Смотрите Распознающиеся Движения и Силы.
С моделью элементов механического устройства Simscape одномерное движение и, с определенными ограничениями, можно соединить интерфейсом с машинами Simscape Multibody. Смотрите Объединение Одного - и 3D Механические Элементы.
Можно использовать блоки от других Библиотек Simulink в моделях Simscape Multibody. Например, можно соединить вывод блоков Датчика Simscape Multibody, чтобы Определить объем блоков от библиотеки Simulink Sinks, чтобы отобразить силы и движения тел и соединений модели. Точно так же можно соединить блоки от библиотеки Simulink Sources до Блоков драйверов Simscape Multibody, чтобы задать относительные движения корпусов машины.
В целом вы соединяете блоки Simscape Multibody таким же образом, вы соединяете другие блоки Simulink: путем проведения линий между ними. Существенные различия существуют, однако, между соединением стандартных блоков Simulink и соединением блоков Simscape Multibody. В этом разделе рассматриваются эти различия.
Линии, которые вы проводите между стандартными блоками Simulink, названными сигнальными линиями, представляют входные параметры и выходные параметры от математических функций, представленных блоками. В отличие от этого, линии, которые вы проводите между блоками Simscape Multibody, названными строками связи, представляют физические соединения и пространственные отношения среди тел, представленных блоками.
Можно провести линии связи только между специализированными портами коннектора, доступными только на блоках Simscape Multibody (см. следующий раздел), и вы не можете перейти существующие строки связи. Строки связи появляются как чистые черные, когда соединено и как подчеркнутые штриховой линией красные линии, когда любой конец не связан.
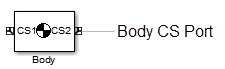
Стандартные блоки Simulink имеют порты ввода и вывода. В отличие от этого, большинство блоков Simscape Multibody содержит только специализированные порты коннектора, которые разрешают вам проводить линии связи среди блоков Simscape Multibody. Порты коннектора Simscape Multibody имеют два типа: порты Body CS и порты общего назначения.
Порты Body CS появляются на блоках Тела и Земли и задают точки контакта на теле или земле. Каждый сопоставлен с системой локальной координаты, источник которой задает местоположение связанной точки контакта на теле.
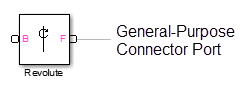
Порты коннектора общего назначения появляются на Соединении, Ограничении, Драйвере, Датчике и блоках Привода. Они разрешают вам соединять Соединения с Телами и соединять Датчики и Приводы к Соединениям, Ограничениям и Драйверам. Порты коннектора общего назначения появляются как круги на значке блока. Круг незаполнен, если порт не связан и заполнен, если порт соединяется.
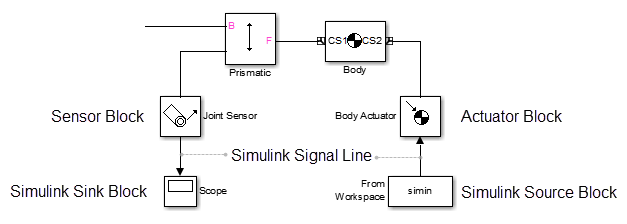
Блоки Привода Simscape Multibody (см. Применение Движений и Сил) содержат стандартные входные порты Simulink. Таким образом можно соединить стандартные блоки Simulink с моделью Simscape Multibody через блоки Привода. Точно так же блоки Датчика Simscape Multibody содержат выходные порты (см. Распознающиеся Движения и Силы). Таким образом можно соединить модель Simscape Multibody с блоками Simulink через блоки Датчика.
Большие, комплексные модели блок-схемы часто трудно анализировать. Включение функционально связанных групп блоков в подсистемах облегчает эту трудность и упрощает повторное использование групп блока в различных моделях.
Можно создать подсистемы, содержащие блоки Simscape Multibody, которые можно соединить с другими блоками Simscape Multibody. Вы делаете это двумя способами:
Автоматически
Вручную
Документация Simulink объясняет больше о создании подсистем.
Автоматически создавать подсистему Simscape Multibody,
Создайте блок-схему подсистемы в своем окне модели, оставив неподключенные порты для внешних связей.
Выбор группы блок-схема подсистемы.
В панели меню Simulink выберите Diagram> Subsystem & Model Reference> Create Subsystem from Selection.
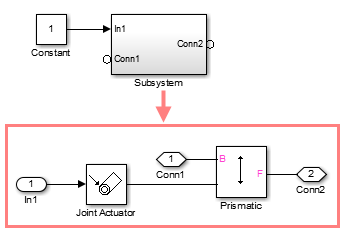
Последний шаг заменяет блок-схему на блок Subsystem, содержащий выбранную блок-схему. Это также создает и соединяет блоки Порта подключения Simscape Multibody для портов, которые вы оставили несвязанным в блок-схеме. Блоки Порта подключения в свою очередь создают значки порта коннектора на значке подсистемы, позволяя вам соединить внешние блоки Simscape Multibody с новой подсистемой.
Иногда необходимо сделать подсистему сконфигурированной по-другому по сравнению с автоматически созданной. Создать подсистему Simscape Multibody вручную,
От библиотеки Simulink Ports & Subsystems добавьте блок Subsystem в модель.
Откройте блок Subsystem.
Создайте блок-схему подсистемы в окне подсистемы.
Перетащите блок Connection Port от библиотеки Simscape Utilities в окно подсистемы для каждого порта, что вы хотите быть доступными внешне.
Соедините внешние порты коннектора с блоками Порта подключения.
Можно создать собственные блоки Simscape Multibody от подсистем, например, пружинный блок Joint или блок Body сферы. Для этого создайте блок-схему, которая реализует функциональность вашего авторского блока, заключите схему как подсистему и добавьте маску (т.е. графический интерфейс пользователя) к подсистеме. Чтобы упростить совместное использование ваших авторских блоков через модели или с другими пользователями, создайте библиотеку блока Simulink и добавьте эти блоки подсистемы маскированные в библиотеку. Документация Simulink объясняет, как создать авторские блоки с масками.