Можно импортировать модель URDF в среду Simscape™ Multibody™. Процесс импорта происходит на одном шаге на основе функции smimport. Функция smimport преобразовывает модель URDF непосредственно в эквивалентную модель Simscape Multibody.
Этот пример показывает, как импортировать модель Onshape® гуманоидного блока робота. Модель включает различные части (” ссылки” на жаргоне URDF) представление туловища, головы и конечностей робота. Части соединяются через шарнирные соединения и сварные швы (” непрерывный” и “зафиксированный” соответственно). Эта модель идентична показанному в Импорте Гуманоидная Модель Onshape. Можно открыть модель от командной строки MATLAB® путем ввода команды:
open sm_humanoid.urdf
Схематичная модель
Используйте функцию smimport, чтобы импортировать модель URDF:
urdfModel = 'sm_humanoid.urdf'; smimport(urdfModel);
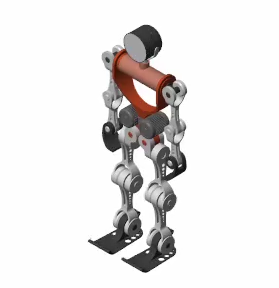
Функция генерирует модель Simscape Multibody гуманоидного робота. Расширение файла требуется, чтобы идентифицировать файл импорта как URDF. Обновите импортированную модель (Simulation> Update Diagram), чтобы открыть статическую визуализацию в начальном состоянии. Данные показывают результаты.

Основывайтесь на модели, например, путем добавления систем управления, чтобы привести в действие различные соединения. Для управляемого примера, в подсказке команды MATLAB вводят sm_import_humanoid_urdf. Моделируйте модель, чтобы просмотреть простую анимацию.