

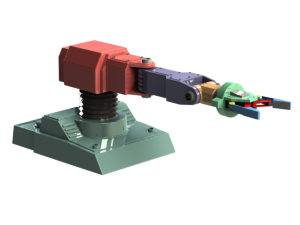
Этот пример показывает, как сгенерировать модель Simscape™ Multibody™ от XML-файла описания мультитела с помощью функции smimport. Пример основан на файле с именем описания мультитела sm_robot и набор файлов геометрии части, включенных в вашу установку Simscape Multibody. Эти файлы описывают модель роботизированной руки, показанную в фигуре.
Описание мультитела и файлы геометрии части, используемые в этом примере, расположены в папке
matlabroot\toolbox\physmod\sm\smdemos\import\robot
C:Programs\MATLAB\
В подсказке команды MATLAB введите команду:
smimport('sm_robot');smimport по умолчанию.
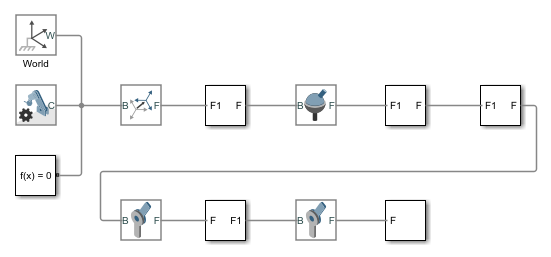
Блоки в сгенерированной модели параметризованы с точки зрения переменных MATLAB. Численные значения этих переменных заданы в файле данных, который называют sm_robot.m и хранят в той же активной папке как сгенерированная модель.
Обновите схему, чтобы визуализировать модель. Можно сделать это из панели меню Simulink® путем выбора Simulation> Update Diagram. Mechanics Explorer открывается статической визуализацией модели роботизированной руки в ее начальной настройке.
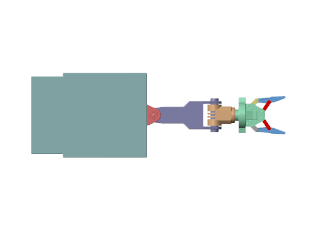
Соглашение представления по умолчанию в Mechanics Explorer отличается от этого в приложении CAD, используемом, чтобы создать исходную модель блока. Mechanics Explorer использует соглашение представления Оси z, в то время как приложение CAD использует соглашение представления Оси Y.
Измените соглашение представления от панели инструментов Mechanics Explorer путем установки параметра View convention на Y up (XY Front). Затем выберите стандартное представление из меню View> Standard Views, чтобы применить новое соглашение представления.
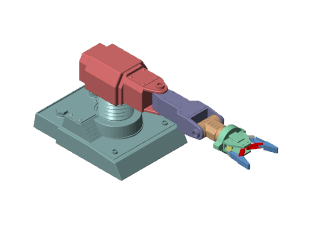
Попытайтесь моделировать модель. Поскольку роботизированная рука испытывает недостаток в системе управления, она просто крутится под силой тяжести. Можно использовать блоки Simulink, чтобы создать систему управления, должен был вести движение роботизированной руки. Система управления преобразовала бы обнаружение движения выходные параметры во входные параметры приведения в действие в различных соединениях. Можно представить порты обнаружения и приведения в действие от объединенных диалоговых окон блока.