Машина индукции ротора раны с на модуль или параметризацией SI
Simscape / Электрический / Электромеханический / Асинхронный
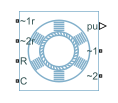
Блок Induction Machine Wound Rotor моделирует ротор раны асинхронная машина с основными параметрами, выраженными в на модуль или в Международной системе единиц (СИ). Ротор раны асинхронная машина является типом машины индукции. Весь статор и связи ротора доступны на блоке. Поэтому можно смоделировать режимы мягкого запуска с помощью переключателя между настройками Уая и дельты или путем увеличения сопротивления ротора. Если вам не нужен доступ к обмоткам ротора, используйте блок Induction Machine Squirrel Cage вместо этого.
Порт Connect ~1 к трехфазной схеме. Чтобы соединить статор в настройке дельты, соедините блок Phase Permute между портами ~1 и ~2. Соединять статор в настройке Уая, порт connect ~2 к Основанному Нейтральному или Плавающему Блоку нейтральных стран. Если вы не должны отличаться сопротивление ротора, соединить порт ~1r ротора с Плавающим Блоком нейтральных стран и порт ~2r ротора к Основанному Блоку нейтральных стран.
Схема ротора отнесена в статор. Поэтому, когда вы используете блок в схеме, отошлите любые дополнительные параметры схемы к статору.
Для реализации SI блок преобразовывает значения SI, к которым вы входите в диалоговое окно на стоимости единицы для симуляции. Для получения информации об отношении между SI и параметрами машины на модуль, смотрите Преобразование На модуль для Параметров Машины. Для получения информации о параметризации на модуль смотрите Систему На модуль Модулей.
Асинхронные уравнения машины выражаются относительно синхронного ссылочного кадра, заданного
где frated является значением параметра Rated electrical frequency.
Преобразование Парка сопоставляет уравнения статора со ссылочным кадром, который является стационарным относительно расчетной электрической частоты. Преобразование Парка задано
где θe является электрическим углом.
Уравнения ротора сопоставлены с другим ссылочным кадром, заданным различием между электрическим углом и продуктом угла ротора θr и количество пар полюса N:
Преобразование Парка используется, чтобы определить асинхронные уравнения машины на модуль. Уравнения напряжения статора определены
и
где:
vds, vqs и v0s является d - ось, q - ось и напряжения статора нулевой последовательности, заданные
va, vb и vc являются напряжениями статора через порты ~1 и ~2.
ωbase является основной электрической скоростью на модуль.
ψds, ψqs и ψ0s является d - ось, q - ось и потокосцепления статора нулевой последовательности.
Rs является сопротивлением статора.
ids, iqs и i0s является d - ось, q - ось и токи статора нулевой последовательности, заданные
ia, ib и ic являются токами статора, вытекающими из порта ~1 к порту ~2.
Уравнения напряжения ротора определены
и
где:
vdr, vqr и v0r является d - ось, q - ось и напряжения ротора нулевой последовательности, заданные
var, vbr и vcr являются напряжениями ротора через порты ~1r и ~2r.
ψdr, ψqr и ψ0r является d - ось, q - ось и потокосцепления ротора нулевой последовательности.
ω является синхронной скоростью на модуль. Для синхронного ссылочного кадра значение равняется 1.
ωr является механической скоростью вращения на модуль.
Rrd является сопротивлением ротора, упомянул статор.
idr, iqr и i0r является d - ось, q - ось и токи ротора нулевой последовательности, заданные
iar, ibr и icr являются токами ротора, вытекающими из порта ~1r к порту ~2r.
Уравнения потокосцепления статора определены
и
где Lss является самоиндукцией статора, и Lm является индуктивностью намагничивания.
Уравнения потокосцепления ротора определены
и
то, где Lrrd является самоиндукцией ротора, упомянуло статор.
Крутящий момент ротора задан
Самоиндукция статора Lss, индуктивность утечки статора Lls и индуктивность намагничивания Lm связана
Самоиндукция ротора Lrrd, индуктивность утечки ротора Llrd и индуктивность намагничивания Lm связана
Когда кривая насыщения обеспечивается, уравнения, чтобы определить влажную индуктивность намагничивания, как функция намагничивания потока:
Ни для какого насыщения уравнение уменьшает до
Можно выполнить графический вывод и отобразить действия с помощью меню Electrical в контекстном меню блока.
Щелкните правой кнопкой по блоку и, из меню Electrical, выберите опцию:
Display Base Values — Отображается машина на модуль основывают значения в Командном окне MATLAB®.
Plot Torque Speed (SI) — Графики закручивают по сравнению со скоростью, оба измеренные в единицах СИ, в окне фигуры MATLAB с помощью текущих параметров машины.
Plot Torque Speed (pu) — Графики закручивают по сравнению со скоростью, оба измеренные в на модуль, в окне фигуры MATLAB с помощью текущих параметров машины.
Plot Open-Circuit Saturation — Напряжение терминала графиков по сравнению с текущим статором без загрузок, оба в на модуль, в окне фигуры MATLAB. График содержит три трассировки:
Ненасыщенный — (ненасыщенная) индуктивность намагничивания Статора.
Насыщаемый — интерполяционная таблица Разомкнутой цепи (v по сравнению с i) вы задаете.
Выведенный — интерполяционная таблица Разомкнутой цепи вывела от интерполяционной таблицы разомкнутой цепи на модуль (v по сравнению с i), вы задаете. Эти данные используются, чтобы вычислить влажную индуктивность намагничивания, Lm_sat, и фактор насыщения, Ks, по сравнению со связью магнитного потока, ψm, характеристиками.
Plot Saturation Factor — Фактор насыщения графиков, Ks, по сравнению со связью магнитного потока, ψm, в окне фигуры MATLAB с помощью параметров машины. Этот параметр выведен от других параметров, которые вы задаете:
Статор без загрузок текущие данные о насыщении, i
Терминальные данные о насыщении напряжения, v
Индуктивность утечки, Lls
Plot Saturated Inductance — Графики, намагничивающие индуктивность, Lm_sat, по сравнению со связью магнитного потока, ψm, в окне фигуры MATLAB с помощью параметров машины. Этот параметр выведен от других параметров, которые вы задаете:
Статор без загрузок текущие данные о насыщении, i
Терминальные данные о насыщении напряжения, v
Индуктивность утечки, Lls
Для реализации SI v находится в V (RMS фазы фазы), и i находится в (RMS).
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для основных переменных перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Основных переменных (Simscape).
Механический вращательный порт сохранения сопоставлен с ротором машины.
Механический вращательный порт сохранения сопоставлен со случаем машины.
Расширяемый трехфазный порт сопоставлен со связями положительного конца статора.
Расширяемый трехфазный порт сопоставлен со связями отрицательного конца статора.
Расширяемый трехфазный порт сопоставлен со связями положительного конца ротора.
Расширяемый трехфазный порт сопоставлен со связями отрицательного конца ротора.
Порт вектора физического сигнала сопоставил с машиной измерения на модуль. Векторные элементы:
pu_torque
pu_velocity
pu_vds
pu_vqs
pu_v0s
pu_ids
pu_iqs
pu_i0s
Все значения параметров по умолчанию основаны на настройке обмотки дельты машины.
Расчетная полная мощность машины индукции. Значением по умолчанию является 15e3
V*A.
Линейное напряжение строки RMS. Значением по умолчанию является 220
V.
Номинальная электрическая частота, соответствующая расчетной полной мощности. Значением по умолчанию является 60
Hz.
Количество машины подпирает пары шестами. Значением по умолчанию является 1.
Модульная система для параметризации блока. Выберите между SI, Международной системой единиц и Per Unit. Значением по умолчанию является SI.
Выбор:
SI представляет SI параметры Saturation и Impedances.
Per Unit представляет Impedances на модуль и параметры Saturation.
Опция, чтобы включать или исключить условия нулевой последовательности.
Включение Включайте условия нулевой последовательности. Чтобы приоритизировать точность модели, используйте эту настройку по умолчанию. Используя эту опцию:
Результаты по ошибке для симуляций, которые используют решатель Разделения. Для получения дополнительной информации смотрите, что Скорость симуляции Увеличения Использует Решатель Разделения (Simscape).
Представляет параметр нулевой последовательности в настройках Impedances.
Exclude — Исключите условия нулевой последовательности. Чтобы приоритизировать скорость симуляции для настольной симуляции или развертывания приложений, выберите эту опцию.
Для параметра Parameterization unit в настройках Main выберите SI, чтобы представить параметры SI или Per Unit, чтобы представить параметры на модуль.
Сопротивление статора. Значением по умолчанию является 0.25
Ohm.
Реактивное сопротивление утечки статора. Значением по умолчанию является 0.9
Ohm.
Сопротивление ротора упомянуло статор. Значением по умолчанию является 0.14
Ohm.
Реактивное сопротивление утечки ротора упомянуло статор. Значением по умолчанию является 0.41
Ohm.
При намагничивании реактивного сопротивления значением по умолчанию является 17
Ohm.
Этот параметр скрыт, если вы устанавливаете
параметр Magnetic saturation representation Saturation на Open-circuit lookup table (v versus i).
Реактивное сопротивление нулевой последовательности статора. Значением по умолчанию является 0.9
Ohm.
Сопротивление статора. Значением по умолчанию является 0.0258.
Индуктивность утечки статора. Значением по умолчанию является 0.0930.
Сопротивление ротора упомянуло статор. Значением по умолчанию является 0.0145.
Индуктивность утечки ротора упомянула статор. Значением по умолчанию является 0.0424.
Намагничивая индуктивность, то есть, пиковое значение ротора статора взаимная индуктивность. Значением по умолчанию является 1.7562.
Индуктивность нулевой последовательности статора. Значением по умолчанию является 0.0930.
Этот параметр скрыт, если вы устанавливаете параметр Main Zero sequence на Exclude.
Для параметра Parameterization unit в настройках Main выберите SI, чтобы представить параметры SI или Per Unit, чтобы представить параметры на модуль.
Блокируйте магнитное представление насыщения. Опции:
'none' Значение по умолчанию.
Per-unit open-circuit lookup table (v versus i)
Другие параметры представлены или скрыты, когда вы устанавливаете Magnetic saturation representation на Per-unit open-circuit lookup table (v versus i).
Текущие данные i заполняют напряжение v по сравнению с полем текущая интерполяционная таблица i. Этот параметр должен содержать вектор с в least10 элементах. Значением по умолчанию является [0, 4, 9, 18, 25, 34, 50, 68, 95, 120]
A.
Этот параметр видим только, когда вы устанавливаете Magnetic saturation representation на Open-circuit lookup table (v versus i).
Терминальное напряжение данные v заполняет напряжение v по сравнению с текущей интерполяционной таблицей i. Этот параметр должен содержать вектор по крайней мере с 10 элементами. Число элементов должно совпадать с числом элементов в векторе для параметра No-load stator current saturation data, I (rms). Значением по умолчанию является [0, 88, 154, 198, 220, 242, 264, 286, 308, 330]
V.
Этот параметр видим только, когда вы устанавливаете Magnetic saturation representation на Open-circuit lookup table (v versus i).
Текущие данные i заполняют напряжение v по сравнению с полем текущая интерполяционная таблица i. Этот параметр должен содержать вектор по крайней мере с 10 элементами. Значением по умолчанию является [0, .176, .396, .792, 1.1, 1.496, 2.2, 2.992, 4.18, 5.28].
Этот параметр видим только, когда вы устанавливаете Magnetic saturation representation на Per-unit open-circuit lookup table (v versus i).
Терминальное напряжение данные v заполняет напряжение v по сравнению с текущей интерполяционной таблицей i. Этот параметр должен содержать вектор по крайней мере с 10 элементами. Число элементов должно совпадать с числом элементов в векторе для параметра Per-unit no-load stator current saturation data, i. Значением по умолчанию является [0, .2309, .4041, .5196, .5774, .6351, .6928, .7506, .8083, .866] pu.
Этот параметр видим только, когда вы устанавливаете Magnetic saturation representation на Per-unit open-circuit lookup table (v versus i).
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Лышевский, S. E. Электромеханические системы, электрические машины и прикладная механотроника. Бока-Ратон, FL: нажатие CRC, 1999.
[3] Ojo, J. O. Consoli, A. и Lipo, T. A. "Улучшенная модель влажных машин индукции", Транзакции IEEE на Промышленных Приложениях. Издание 26, № 2, стр 212-221, 1990.
