Прежде чем можно будет использовать PID Tuner, вы должны:
Создайте модель Simulink®, содержащую ПИД-регулятор, Дискретный ПИД-регулятор, ПИД-регулятор (2DOF), или блок Discrete PID Controller (2DOF). Ваша модель может иметь один или несколько блоков ПИДа, но можно только настроить один блок PID за один раз.
Если вы настраиваете многоконтурную систему управления со связью между циклами, рассматриваете использование других инструментов Simulink Control Design™ вместо PID Tuner. Смотрите Control System Designer и Каскадный Многоконтурный Проект Обратной связи для получения дополнительной информации.
ПИД-регулятор блокирует сигналы вектора поддержки. Однако использование PID Tuner требует скалярных сигналов во входных параметрах блока. Таким образом, блок PID должен представлять один ПИД-регулятор.
Ваш объект (все блоки в цикле управления кроме контроллера) может быть линейным или нелинейным. Объект может также иметь любой порядок и иметь любые задержки.
Сконфигурируйте настройки блока PID, такие как тип контроллера, форма контроллера, временной интервал, шаг расчета. Смотрите отдельные страницы с описанием блока для получения дополнительной информации о конфигурировании этих настроек:
Открыть PID Tuner и просмотреть первоначальный проект компенсатора:
Откройте модель Simulink путем введения имени модели в командной строке MATLAB®.
Чтобы открыть диалоговое окно блока, дважды кликните блок ПИД-регулятора.
В диалоговом окне блока, в Select Tuning Method выпадающий список, выбирают Transfer Function Based (PID Tuner App). Чтобы открыть PID Tuner, нажмите Tune.
Когда вы открываете PID Tuner, следующие действия происходят:
PID Tuner автоматически линеаризует объект в рабочей точке, заданной образцовыми начальными условиями, как описано в том, Какой Объект PID Tuner Видит?. Если вы хотите разработать контроллер для различной рабочей точки, смотрите Мелодию в Различной Рабочей точке.
Если модель объекта управления в цикле ПИДа линеаризует, чтобы обнулить, PID Tuner обеспечивает диалоговое окно Obtain plant model. Это диалоговое окно позволяет вам получать новую модель объекта управления также:
Линеаризация в различной рабочей точке (см. Мелодию в Различной Рабочей точке).
Импорт объекта модели LTI, представляющего объект. Например, можно импортировать данные о частотной характеристике (модель frd) полученный оценкой частотной характеристики. Для получения дополнительной информации смотрите, что ПИД-регулятор Проекта Использует Предполагаемую Частотную характеристику.
Идентификация линейной модели объекта управления от моделируемых или измеренных данных об ответе (требует программного обеспечения System Identification Toolbox™). PID Tuner использует систему идентификации, чтобы оценить линейную модель объекта управления от ответа временного интервала вашего объекта к прикладному входу. Для примера смотрите В интерактивном режиме Оценочный Объект от Измеренных или Моделируемых Данных об Ответе.
Как альтернатива, можно выйти из PID Tuner и использовать Frequency Response Based PID Tuner, который запускает симуляции, чтобы встревожить объект и оценить частотные характеристики на частотах около пропускной способности управления. Смотрите основанную на частотной характеристике Настройку.
PID Tuner вычисляет первоначальный проект компенсатора для линеаризовавшей модели объекта управления с помощью алгоритма, описанного в Настраивающем Алгоритме ПИДа.
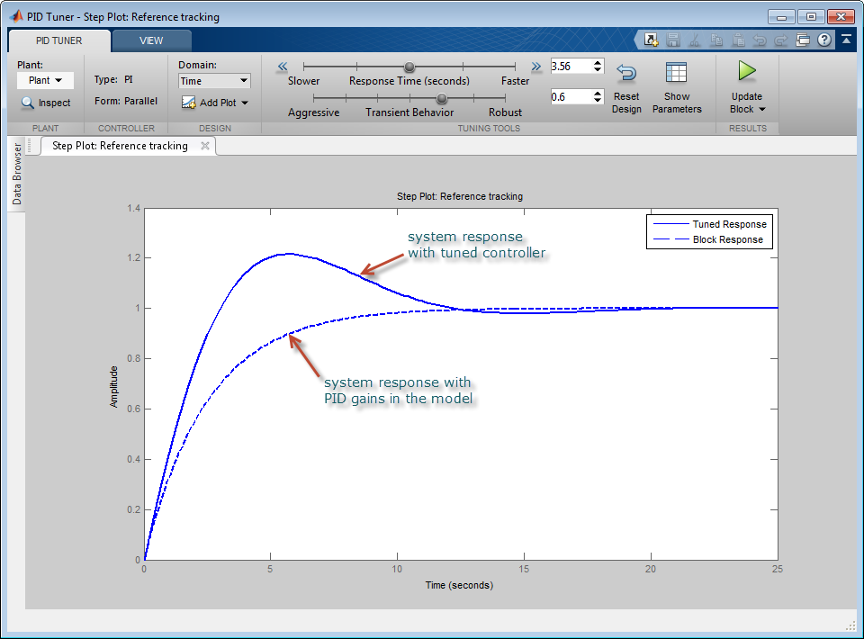
PID Tuner отображает ответ отслеживания уставки шага с обратной связью для первоначального проекта компенсатора. Для сравнения отображение также включает ответ с обратной связью для усилений, заданных в блоке ПИД-регулятора, если тот замкнутый цикл стабилен, как показано в следующей фигуре.
После того, как тюнер открывается, можно закрыться, контроллер блокируют диалоговое окно.
