Осуществите пассивность определенной карты ввода/вывода при использовании Control System Tuner.
Цель пассивности осуществляет пассивность ответа передаточной функции между заданными местоположениями сигнала. Системой является passive, если все его траектории ввода-вывода (u (t), y (t)) удовлетворяют:
для всего T> 0. Эквивалентно, система пассивна, если ее частотная характеристика положительна действительный, что означает это для всего ω> 0,
Цель пассивности создает ограничение, которое осуществляет:
для всего T> 0. Чтобы осуществить полное условие пассивности, установите минимальный входной индекс пассивности (ν) и минимальный выходной индекс пассивности (ρ) обнулять. Чтобы осуществить избыток пассивности при вводах или выводах, установите ν или ρ к положительному значению. Чтобы разрешить нехватку пассивности, установите ν или ρ к отрицательной величине. Займитесь Индексами Пассивности и Пассивности (Control System Toolbox) для получения дополнительной информации об этих индексах.
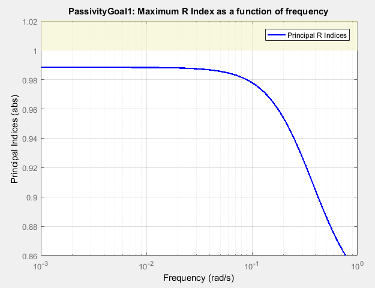
В Control System Tuner заштрихованная область на графике представляет область в частотном диапазоне, в котором не удовлетворяют настраивающейся цели. График показывает значение индекса, описанного в Алгоритмах.
Во вкладке Tuning Control System Tuner выберите New Goal> Passivity Goal.
При настройке систем управления в командной строке используйте TuningGoal.Passivity, чтобы задать ограничение пассивности.
Используйте этот раздел диалогового окна, чтобы задать вводы и выводы передаточной функции, которую ограничивает настраивающаяся цель. Также задайте любые местоположения в который к разомкнутым циклам для оценки настраивающейся цели.
Specify input signals
Выберите одно или несколько местоположений сигнала в своей модели как входные параметры к передаточной функции, которую ограничивает настраивающаяся цель. Чтобы ограничить ответ SISO, выберите однозначный входной сигнал. Например, чтобы ограничить усиление от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'u'. Чтобы ограничить пассивность ответа MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Specify output signals
Выберите одно или несколько местоположений сигнала в своей модели как выходные параметры передаточной функции, которую ограничивает настраивающаяся цель. Чтобы ограничить ответ SISO, выберите однозначный выходной сигнал. Например, чтобы ограничить усиление от местоположения под названием 'u' к местоположению под названием 'y', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'y'. Чтобы ограничить пассивность ответа MIMO, выберите несколько сигналов или сигнал с векторным знаком.
Compute input/output gain with the following loops open
Выберите одно или несколько местоположений сигнала в своей модели, в которой можно открыть обратную связь в целях оценки этой настраивающей цели. Настраивающаяся цель оценена против настройки разомкнутого цикла, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Например, чтобы оценить настраивающуюся цель с открытием в местоположении под названием 'x', нажмите![]() Add signal to list и выберите
Add signal to list и выберите 'x'.
Чтобы подсветить любой выбранный сигнал в модели Simulink®, щелкнуть![]() . Чтобы удалить сигнал из списка вводов или выводов, щелкнуть
. Чтобы удалить сигнал из списка вводов или выводов, щелкнуть![]() . Когда вы выбрали несколько сигналов, можно переупорядочить их использование
. Когда вы выбрали несколько сигналов, можно переупорядочить их использование![]() и
и![]() . Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
. Для получения дополнительной информации о том, как задать местоположения сигнала для настраивающейся цели, смотрите, Задают Цели по Интерактивной Настройке.
Используйте этот раздел диалогового окна, чтобы задать дополнительные характеристики цели пассивности.
Minimum input passivity index
Введите целевое значение ν в текстовом поле. Чтобы осуществить избыток пассивности в заданных входных параметрах, установите ν> 0. Чтобы разрешить нехватку пассивности, установите ν <0. По умолчанию цель пассивности осуществляет ν = 0, пассивный во входных параметрах без необходимого избытка пассивности.
Minimum output passivity index
Введите целевое значение ρ в текстовом поле. Чтобы осуществить избыток пассивности при заданных выходных параметрах, установите ρ> 0. Чтобы разрешить нехватку пассивности, установите ρ <0. По умолчанию цель пассивности осуществляет ρ = 0, пассивный при выходных параметрах без необходимого избытка пассивности.
Enforce goal in frequency range
Ограничьте осуществление настраивающейся цели к конкретному диапазону частот. Задайте диапазон частот как вектор - строку из формы [min,max], выраженный в единицах частоты вашей модели. Например, чтобы создать настраивающуюся цель, которая применяется только между 1 и 100 рад/с, введите [1,100]. По умолчанию настраивающаяся цель применяется на всех частотах в течение непрерывного времени, и до частоты Найквиста в течение дискретного времени.
Apply goal to
Используйте эту опцию при настройке многоуровневых моделей целиком, таких как массив моделей, полученных путем линеаризации модели Simulink в различных рабочих точках или значениях параметров блоков. По умолчанию активные настраивающие цели осуществляются для всех моделей. Чтобы осуществить настраивающееся требование для подмножества моделей в массиве, выберите Only Models. Затем введите индексы массива моделей, для которых осуществляется цель. Например, предположите, что вы хотите применить настраивающуюся цель к вторым, третьим, и четвертым моделям в образцовом массиве. Чтобы ограничить осуществление требования, введите 2:4 в текстовое поле Only Models.
Для получения дополнительной информации о настройке для многоуровневых моделей, смотрите Устойчивые Настраивающие Подходы (Robust Control Toolbox).
Когда вы настраиваете систему управления, программное обеспечение преобразовывает каждую настраивающую цель в нормированное скалярное значение f (x). Здесь, x является вектором свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для Passivity Goal, для передаточной функции с обратной связью G (s, x) от заданных входных параметров до заданных выходных параметров, f (x) дают:
R является относительным индексом сектора (см. getSectorIndex) [G (s, x); I], для сектора, представленного:
где ρ является минимальным выходным индексом пассивности, и ν является минимальным входным индексом пассивности, заданным в диалоговом окне. R макс. зафиксирован в 106, включен, чтобы избежать числовых ошибок для очень большого R.
Эта настраивающая цель налагает неявное ограничение минимальной фазы на передаточную функцию G + I. Нулями передачи G + I является stabilized dynamics для этой настраивающей цели. Minimum decay rate и Maximum natural frequency, настраивающий опции, управляют нижними и верхними границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, на вкладке Tuning, использует Tuning Options, чтобы изменить значения по умолчанию.
