Когда вы запускаете свою модель Simulink® использование коэффициентов ПИД, вычисленных PID Tuner, симуляция, вывод отличается от графика ответа PID Tuner.
Существует несколько причин, почему моделируемая модель может отличаться от графика ответа PID Tuner. Если моделируемый результат соответствует вашим конструктивным требованиям (несмотря на отличие от ответа PID Tuner), вы не должны совершенствовать проект далее. Если моделируемый результат не соответствует вашим конструктивным требованиям, смотрите, не Может Найти Приемлемый Проект ПИДа в Моделируемой Модели.
Некоторые причины для различия между моделируемым и ответами PID Tuner включают:
Ссылочные сигналы или сигналы воздействия в вашей модели Simulink отличаются от сигналов шага тот PID Tuner использование. Если вы должны продвинуться сигналы оценить производительность ПИД-регулятора в вашей модели, изменить ссылочные сигналы в вашей модели, чтобы продвинуться сигналы.
Структура вашей модели отличается от циклической структуры, для которой разрабатывает PID Tuner. PID Tuner принимает настройку цикла, показанную в следующей фигуре.
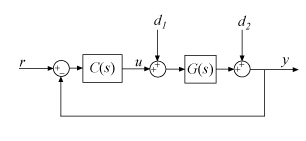
Когда фигура иллюстрирует, проекты PID Tuner для ПИД-регулятора в feedforward пути обратной связи усиления единицы. Если ваша модель Simulink отличается от этой структуры или вводит сигнал воздействия в другом месте, ваш моделируемый ответ отличается от ответа PID Tuner.
Вы активировали нелинейные опции в блоке PID Controller в вашей модели, такие как пределы насыщения или антизаключительная схема. PID Tuner игнорирует нелинейные настройки в блоке PID Controller, который может заставить PID Tuner давать различный ответ от симуляции.
Ваша модель Simulink имеет сильную нелинейность на объекте, которая делает линеаризацию недопустимой в полном рабочем диапазоне симуляции.
Вы выбрали рабочую точку с помощью PID Tuner, который отличается от рабочей точки, сохраненной в модели. В этом случае PID Tuner разработал контроллер для различной рабочей точки, чем рабочая точка, которая начинает симуляцию. Моделируйте свою модель с помощью рабочей точки PID Tuner путем инициализации модели Simulink с этой рабочей точкой. Смотрите Моделируют Модель Simulink в Определенной Рабочей точке.
Дискретный ПИД-регулятор | Дискретный ПИД-регулятор (2DOF) | ПИД-регулятор | ПИД-регулятор (2DOF)
