Сопоставленное регулирование с зависимой скоростью опцией
Vehicle Dynamics Blockset / регулирование
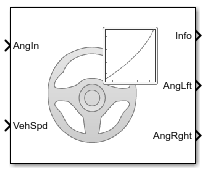
Блок Mapped Steering реализует интерполяционные таблицы, чтобы вычислить правые и левые углы колеса. Используйте параметр Speed dependent, чтобы реализовать зависимую скоростью таблицу для угловых вычислений. Блок использует систему координат автомобиля.
| Зависимый скорости | Реализация | Вычисления |
|---|---|---|
on (значение по умолчанию) | Блок использует три таблицы:
|
|
off | Блок использует две таблицы:
|
|
Уравнения используют эти переменные.
| δin |
Угол руля |
| δSpdF |
Угловой фактор скорости руля |
| δSuprImp |
Наложенный угол руля |
| δL, δR |
Левые и правые углы колеса, соответственно |
[1] Crolla, Дэвид, Дэвид Фостер, и др. Энциклопедия Автомобильной Разработки. Объем 4, Часть 5 (Системы Шасси) и Часть 6 (Электрические и Электронные системы). Чичестер, Западный Сассекс, Соединенное Королевство: John Wiley & Sons Ltd, 2015.
[2] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 1992.
[3] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 2008.
