Серьезная приостановка оси - листовая рессора
Серьезная приостановка оси с листовой рессорой
Описание
Блок Solid Axle Suspension - Leaf Spring реализует серьезную приостановку оси со спиральной пружиной для нескольких осей с несколькими дорожками на ось.
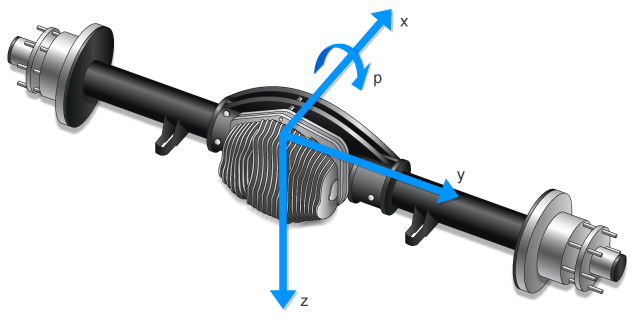
Блок моделирует соответствие приостановки, затухание и геометрические эффекты как функции положений дорожки и скоростей, со специфичным для оси соответствием и затуханием параметров. Используя положение дорожки и скорость, блок вычисляет вертикальное положение дорожки и силы приостановки на автомобиле и колесе. Блок использует Z-down (заданный в SAE J670) и твердая система координат оси. Твердая система координат оси, показанная здесь, выравнивается с системой координат автомобиля Z-down с осью X в направлении прямого движения автомобиля.
| Для каждого | Можно задать |
|---|
|
Ось
|
Несколько дорожек. Параметры приостановки.
|
|
Дорожка
|
|
Блок содержит хранящие энергию пружинные элементы и рассеивающие энергию элементы демпфера. Блок также хранит энергию через угловое ускорение списка оси и центр оси массового вертикального и поперечного ускорения.
Эта таблица суммирует настройки параметров блоков для автомобиля с:
| Параметр | Установка |
|---|
| Number of axles, NumAxl | 2 |
Number of tracks by axle, NumTracksByAxl | [2 2] |
| Steered axle enable by axle, StrgEnByAxl | [1 0] |
Соответствие приостановки и затухание
Блок использует линейную пружину и демпфер, чтобы смоделировать вертикальные динамические эффекты системы подвески на автомобиле и колесе. А именно, блок:
|
Использование
|
Вычислять
|
|---|
Продольное и боковое смещение и скорость автомобиля. Продольное и боковое смещение и скорость дорожки. Вертикальные силы колеса обратились к автомобилю.
|
Силы приостановки обратились к центру оси. Вертикальные смещения и скорости автомобиля и дорожки. Продольные, боковые и вертикальные силы приостановки и моменты обратились к автомобилю. Продольные, боковые и вертикальные силы приостановки и моменты обратились к колесу.
|
Чтобы вычислить динамику оси, блок реализует эти уравнения. Блок пропускает эффекты:
Сетевая вертикальная сила на центре оси массы является суммой колеса и сил приостановки, действующих на ось.
Сетевой момент о продольной оси серьезной приостановки оси составляет hardpoint координаты приостановки и дорожек.
Параметры блоков обеспечивают дорожку и приостановку hardpoints координаты.
Блок использует Углы Эйлера, чтобы преобразовать дорожку и смещения приостановки, скорости и ускорения к системе координат автомобиля.
Вычислить силы приостановки применилось к автомобилю, блок реализует это уравнение.
Силы приостановки и моменты обратились к автомобилю, равны силам приостановки, и моменты применились к колесу.
Вычислить вертикальную силу применилось к приостановке в местоположении дорожки, блок реализует жесткий пружинный демпфер.
Уравнения используют эти переменные.
| Fwza,t, Mwza,t | Сила приостановки и момент применилась к колесу на оси a, дорожка t вдоль зафиксированной колесом оси z |
| Fwxa,t, Mwxa,t | Сила приостановки и момент применилась к колесу на оси a, дорожка t вдоль зафиксированной колесом оси X |
| Fwya,t, Mwya,t | Сила приостановки и момент применилась к колесу на оси a, дорожка t вдоль зафиксированной колесом оси Y |
| Fvza,t, Mvza,t | Сила приостановки и момент применилась к автомобилю на оси a, дорожка t вдоль зафиксированной колесом оси z |
| Fvxa,t, Mvxa,t | Сила приостановки и момент применилась к автомобилю на оси a, дорожка t вдоль зафиксированной колесом оси X |
| Fvya,t, Mvya,t | Сила приостановки и момент применилась к автомобилю на оси a, дорожка t вдоль зафиксированной колесом оси Y |
| Fz0a | Вертикальная сила предварительной нагрузки пружины подвески применилась к колесам на оси a |
| kza | Вертикальный коэффициент упругости применился к дорожкам на оси a |
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в поставщике услуг колеса для дорожек на оси a |
| δsteera,t | При регулировании углового входа для оси a отследите t |
| cza | Вертикальное постоянное затухание применилось к дорожкам на оси a |
| Rewa,t | Эффективный радиус колеса для оси a, отследите t |
| Fzhstopa,t | Вертикальная сила hardstop в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| Fzaswya,t | Вертикальная сила антивлияния в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| zva,t, żva,t | Смещение автомобиля и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| zwa,t, żwa,t | Отследите смещение и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| xva,t, ẋva,t | Смещение автомобиля и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| xwa,t, ẋwa,t | Отследите смещение и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| yva,t, ẏva,t | Смещение автомобиля и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси Y |
| ywa,t, ẏwa,t | Отследите смещение и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси Y |
| Ha,t | Высота приостановки в оси a, отследите t |
| Rewa,t | Эффективный радиус колеса в оси a, отследите t |
Силы Hardstop
hardstop сила обратной связи, Fzhstopa,t, что блок применяется, зависят от того, сжимает ли приостановка или расширяет. Блок прикладывает силу:
В сжатии, когда приостановка сжата больше, чем максимальное расстояние, заданное параметром Suspension maximum height, Hmax.
В расширении, когда расширение приостановки больше, чем максимальное расширение, заданное параметром Suspension maximum height, Hmax.
Чтобы вычислить силу, блок использует жесткость на основе гиперболической касательной и экспоненциального масштабирования.
Изгиб, литейщик и углы пальца ноги
Чтобы вычислить изгиб, литейщика и углы пальца ноги, блок использует линейные функции высоты приостановки и держащегося угла.
Уравнения используют эти переменные.
| ξa,t |
Угол изгиба колеса на оси a, отследите t
|
| ηa,t |
Угол литейщика колеса на оси a, отследите t
|
| ζa,t |
Угол пальца ноги колеса на оси a, отследите t
|
| ξ0a, η0a, ζ0a |
Номинальная ось приостановки изгиб, литейщик и углы пальца ноги, соответственно, под нулевым руководящим углом
|
| mhcambera, mhcastera, mhtoea |
Изгиб, литейщик и углы пальца ноги, соответственно, по сравнению с высотой приостановки клонятся для оси a
|
| mcambersteera, mcastersteera, mtoesteera |
Изгиб, литейщик и углы пальца ноги, соответственно, по сравнению с держащимся углом клонятся для оси a
|
| mhsteera |
Регулирование угла по сравнению с вертикальной силой клонится для оси a
|
| δsteera,t |
При регулировании углового входа для оси a отследите t
|
| zva,t |
Смещение автомобиля в оси a, отследите t вдоль зафиксированной автомобилем оси z
|
| zwa,t |
Отследите смещение в оси a, отследите t вдоль зафиксированной автомобилем оси z
|
Регулирование углов
Опционально, можно ввести держащиеся углы для дорожек. Чтобы вычислить держащиеся углы для колес, блок смещает входные руководящие углы с линейной функцией высоты приостановки.
Уравнение использует эти переменные.
| mtoesteera |
Ось угол пальца ноги a по сравнению с держащимся угловым наклоном
|
| mhsteera |
Ось руководящий угол a по сравнению с вертикальным наклоном силы
|
| mhtoea |
Ось угол пальца ноги a по сравнению с наклоном высоты приостановки
|
| δwhlsteera,t |
Руководящий угол колеса для оси a, отследите t
|
| δsteera,t |
При регулировании углового входа для оси a отследите t
|
| zva,t |
Смещение автомобиля в оси a, отследите t вдоль зафиксированной автомобилем оси z
|
| zwa,t |
Отследите смещение в оси a, отследите t вдоль зафиксированной автомобилем оси z
|
Степень и энергия
Блок вычисляет эти характеристики приостановки для каждой оси, a, дорожки, t.
| Вычисление | Уравнение |
|---|
Рассеянная степень, Psuspa,t | |
Поглощенная энергия, Esuspa,t | |
Высота приостановки, Ha,t | |
Расстояние от поставщика услуг колеса центрируется к интерфейсу шины/дороги | |
Уравнения используют эти переменные.
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в поставщике услуг колеса для дорожек на оси a |
| δsteera,t | При регулировании углового входа для оси a отследите t |
| Rewa,t | Ось a, дорожка t эффективный радиус колеса от поставщика услуг колеса центрируются к интерфейсу шины/дороги |
| Fz0a |
Вертикальная сила предварительной нагрузки пружины подвески применилась к колесам на оси a
|
| zwtra,t |
Расстояние от поставщика услуг колеса центрируется к интерфейсу шины/дороги вдоль зафиксированной автомобилем оси z
|
| zva,t, żva,t | Смещение автомобиля и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси z |
| zwa,t, żwa,t | Отследите смещение и скорость в оси a, отследите t вдоль зафиксированной автомобилем оси z |
Порты
Входной параметр
развернуть все
WhlPz — Дорожка z - смещение оси
array
Отследите смещение, zw, вдоль зафиксированной колесом оси z, в m. Измерениями массива является 1 общим количеством дорожек на автомобиле.
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlPz:
WhlRe — Колесо эффективный радиус
array
Эффективный радиус колеса, Rew, в m. Измерениями массива является 1 общим количеством дорожек на автомобиле.
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlRe:
WhlVz — Дорожка z - скорость оси
array
Отследите скорость, żw, вдоль зафиксированной колесом оси z, в m. Измерениями массива является 1 общим количеством дорожек на автомобиле.
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlVz:
WhlFx — Продольная сила колеса на автомобиле
array
Продольная сила колеса применилась к автомобилю, Fwx, вдоль зафиксированной автомобилем оси X. Измерениями массива является 1 общим количеством дорожек на автомобиле.
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlFx:
WhlFy — Боковая сила колеса на автомобиле
array
Боковая сила колеса применилась к автомобилю, Fwy, вдоль зафиксированной автомобилем оси Y. Измерениями массива является 1 общим количеством дорожек на автомобиле.
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlFy:
WhlM — Момент приостановки на колесе
array
Продольные, боковые, и вертикальные моменты приостановки в оси a, t дорожки, применились к колесу в координате ссылки поставщика услуг колеса оси в N · m. Измерениями массива является 3 общим количеством дорожек на автомобиле.
WhlM(1,...) — Момент приостановки применился к колесу о зафиксированной автомобилем (продольной) оси X
WhlM(2,...) — Момент приостановки применился к колесу о зафиксированной автомобилем оси Y (ответвление)
WhlM(3,...) — Момент приостановки применился к колесу о зафиксированной автомобилем (вертикальной) оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlM:
Размерностями сигнала является [3x4].
Сигнал содержит моменты приостановки, применился к четырем колесам согласно их оси и местоположениям дорожки.
| Элемент массива | Ось | Дорожка | Ось момента |
|---|
WhlM(1,1) | 1 | 1 | Зафиксированная автомобилем (продольная) ось X |
WhlM(1,2) | 1 | 2 |
WhlM(1,3) | 2 | 1 |
WhlM(1,4) | 2 | 2 |
WhlM(2,1) | 1 | 1 | Зафиксированная автомобилем ось Y (ответвление) |
WhlM(2,2) | 1 | 2 |
WhlM(2,3) | 2 | 1 |
WhlM(2,4) | 2 | 2 |
WhlM(3,1) | 1 | 1 | Зафиксированная автомобилем (вертикальная) ось z |
WhlM(3,2) | 1 | 2 |
WhlM(3,3) | 2 | 1 |
WhlM(3,4) | 2 | 2 |
VehP — Смещение автомобиля
array
Смещение автомобиля от оси a, отследите t вдоль зафиксированной автомобилем системы координат в m. Измерениями массива является 3 общим количеством дорожек на автомобиле.
VehP(1,...) — Смещение автомобиля от дорожки, xv, вдоль зафиксированной автомобилем оси X
VehP(2,...) — Смещение автомобиля от дорожки, yv, вдоль зафиксированной автомобилем оси Y
VehP(3,...) — Смещение автомобиля от дорожки, zv, вдоль зафиксированной автомобилем оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, VehP:
VehV — Скорость автомобиля
array
Скорость автомобиля в оси a, отследите t вдоль зафиксированной автомобилем системы координат в m. Размерностями входного массива является 3 a *t.
VehV(1,...) — Скорость автомобиля в дорожке, xv, вдоль зафиксированной автомобилем оси X
VehV(2,...) — Скорость автомобиля в дорожке, yv, вдоль зафиксированной автомобилем оси Y
VehV(3,...) — Скорость автомобиля в дорожке, zv, вдоль зафиксированной автомобилем оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, VehV:
StrgAng — Регулирование угла, дополнительного
array
Дополнительный руководящий угол для каждого колеса, δ. Размерностями входного массива является 1 количеством управляемых дорожек.
Например, для автомобиля 2D оси с двумя дорожками на ось, можно ввести держащиеся углы для обоих колес на первой оси.
Чтобы создать порт StrgAng, установите Steered axle enable by axle, StrgEnByAxl на [1 0]. Измерениями массива входного сигнала является [1x2].
Сигнал StrgAng содержит два держащихся угла согласно их оси и местоположениям дорожки.
| Элемент массива | Ось | Дорожка |
|---|
StrgAng(1,1) | 1 | 1 |
StrgAng(1,2) | 1 | 2 |
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1 создает:
Входной порт StrgAng.
Параметры:
Toe angle vs steering angle slope, ToeStrgSlp
Caster angle vs steering angle slope, CasterStrgSlp
Camber angle vs steering angle slope, CamberStrgSlp
Suspension height vs steering angle slope, StrgHgtSlp
Вывод
развернуть все
Информация Сигнал шины
шина
Соедините шиной сигнал, содержащий значения блока. Сигналы являются массивами, которые зависят от местоположения дорожки.
Например, здесь индексы для 2D оси, 2D отслеживают автомобиль. Общее количество дорожек равняется четырем.
| Сигнал | Описание | Сигнал массивов | Переменная | Модули |
|---|
Camber | Углы колеса согласно оси. | 1D |
| рад |
Caster |
|
Toe |
|
Height | Высота приостановки | 1D | H | m |
Power | Рассеивание энергии приостановки | 1D | Psusp | W |
Energy | Приостановка поглотила энергию | 1D | Esusp | J |
VehF | Силы приостановки обратились к автомобилю | 3D | Для 2D оси, двух дорожек на автомобиль оси:
| N |
VehM | Моменты приостановки применились к автомобилю | 3D | Для 2D оси, двух дорожек на автомобиль оси:
| N· |
WhlF | Сила приостановки применилась к колесу | 3D | Для 2D оси, двух дорожек на автомобиль оси:
| N |
WhlP | Отследите смещение | 3D | Для 2D оси, двух дорожек на автомобиль оси:
| m |
WhlV | Отследите скорость | 3D | Для 2D оси, двух дорожек на автомобиль оси:
| m/s |
WhlAng | Изгиб колеса, литейщик, углы пальца ноги | 3D | Для 2D оси, двух дорожек на автомобиль оси:
| рад |
VehF — Сила приостановки на автомобиле
array
Продольная, боковая, и вертикальная сила приостановки в оси a, t дорожки, применилась к автомобилю в точке контакта приостановки в N. Измерениями массива является 3 общим количеством дорожек на автомобиле.
VehF(1,...) — Сила приостановки применилась к автомобилю вдоль зафиксированной автомобилем (продольной) оси X
VehF(2,...) — Сила приостановки применилась к автомобилю вдоль зафиксированной автомобилем оси Y (ответвление)
VehF(3,...) — Сила приостановки применилась к автомобилю вдоль зафиксированной автомобилем (вертикальной) оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, VehF:
Размерностями сигнала является [3x4].
Сигнал содержит силы приостановки, применился к автомобилю согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Обеспечьте ось |
|---|
VehF(1,1) | 1 | 1 | Зафиксированная автомобилем (продольная) ось X |
VehF(1,2) | 1 | 2 |
VehF(1,3) | 2 | 1 |
VehF(1,4) | 2 | 2 |
VehF(2,1) | 1 | 1 | Зафиксированная автомобилем ось Y (ответвление) |
VehF(2,2) | 1 | 2 |
VehF(2,3) | 2 | 1 |
VehF(2,4) | 2 | 2 |
VehF(3,1) | 1 | 1 | Зафиксированная автомобилем (вертикальная) ось z |
VehF(3,2) | 1 | 2 |
VehF(3,3) | 2 | 1 |
VehF(3,4) | 2 | 2 |
VehM — Момент приостановки на автомобиле
array
Продольный, боковой, и вертикальный момент приостановки в оси a, t дорожки, применился к автомобилю в точке контакта приостановки в N · m. Измерениями массива является 3 общим количеством дорожек на автомобиле.
VehM(1,...) — Момент приостановки применился к автомобилю о зафиксированной автомобилем (продольной) оси X
VehM(2,...) — Момент приостановки применился к автомобилю о зафиксированной автомобилем оси Y (ответвление)
VehM(3,...) — Момент приостановки применился к автомобилю о зафиксированной автомобилем (вертикальной) оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, VehM:
Размерностями сигнала является [3x4].
Сигнал содержит моменты приостановки, применился к автомобилю согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Ось момента |
|---|
VehM(1,1) | 1 | 1 | Зафиксированная автомобилем (продольная) ось X |
VehM(1,2) | 1 | 2 |
VehM(1,3) | 2 | 1 |
VehM(1,4) | 2 | 2 |
VehM(2,1) | 1 | 1 | Зафиксированная автомобилем ось Y (ответвление) |
VehM(2,2) | 1 | 2 |
VehM(2,3) | 2 | 1 |
VehM(2,4) | 2 | 2 |
VehM(3,1) | 1 | 1 | Зафиксированная автомобилем (вертикальная) ось z |
VehM(3,2) | 1 | 2 |
VehM(3,3) | 2 | 1 |
VehM(3,4) | 2 | 2 |
WhlF — Сила приостановки на колесе
array
Продольные, боковые, и вертикальные силы приостановки в оси a, t дорожки, обратились к колесу в координате ссылки поставщика услуг колеса оси в N. Измерениями массива является 3 общим количеством дорожек на автомобиле.
WhlF(1,...) — Сила приостановки на колесе вдоль зафиксированной автомобилем (продольной) оси X
WhlF(2,...) — Сила приостановки на колесе вдоль зафиксированной автомобилем оси Y (ответвление)
WhlF(3,...) — Сила приостановки на колесе вдоль зафиксированной автомобилем (вертикальной) оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlF:
Размерностями сигнала является [3x4].
Сигнал содержит силы колеса, применился к автомобилю согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Обеспечьте ось |
|---|
WhlF(1,1) | 1 | 1 | Зафиксированная автомобилем (продольная) ось X |
WhlF(1,2) | 1 | 2 |
WhlF(1,3) | 2 | 1 |
WhlF(1,4) | 2 | 2 |
WhlF(2,1) | 1 | 1 | Зафиксированная автомобилем ось Y (ответвление) |
WhlF(2,2) | 1 | 2 |
WhlF(2,3) | 2 | 1 |
WhlF(2,4) | 2 | 2 |
WhlF(3,1) | 1 | 1 | Зафиксированная автомобилем (вертикальная) ось z |
WhlF(3,2) | 1 | 2 |
WhlF(3,3) | 2 | 1 |
WhlF(3,4) | 2 | 2 |
WhlV — Отследите скорость
array
Продольная, боковая, и вертикальная скорость дорожки в оси a, отследите t в m/s. Измерениями массива является 3 общим количеством дорожек на автомобиле.
WhlV(1,...) — Отследите скорость вдоль зафиксированной автомобилем (продольной) оси X
WhlV(2,...) — Отследите скорость вдоль зафиксированной автомобилем оси Y (ответвление)
WhlV(3,...) — Отследите скорость вдоль зафиксированной автомобилем (вертикальной) оси z
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlV:
Размерностями сигнала является [3x4].
Сигнал содержит силы колеса, применился к автомобилю согласно местоположениям дорожки и оси.
| Элемент массива | Ось | Дорожка | Обеспечьте ось |
|---|
WhlV(1,1) | 1 | 1 | Зафиксированная автомобилем (продольная) ось X |
WhlV(1,2) | 1 | 2 |
WhlV(1,3) | 2 | 1 |
WhlV(1,4) | 2 | 2 |
WhlV(2,1) | 1 | 1 | Зафиксированная автомобилем ось Y (ответвление) |
WhlV(2,2) | 1 | 2 |
WhlV(2,3) | 2 | 1 |
WhlV(2,4) | 2 | 2 |
WhlV(3,1) | 1 | 1 | Зафиксированная автомобилем (вертикальная) ось z |
WhlV(3,2) | 1 | 2 |
WhlV(3,3) | 2 | 1 |
WhlV(3,4) | 2 | 2 |
WhlAng — Изгиб колеса, литейщик, углы пальца ноги
array
Изгиб, литейщик, и углы пальца ноги в оси a, отслеживает t в раде. Измерениями массива является 3 общим количеством дорожек на автомобиле.
WhlAng(1,...) — Угол изгиба
WhlAng(2,...) — Угол литейщика
WhlAng(3,...) — Угол пальца ноги
Например, для автомобиля 2D оси с двумя дорожками на ось, WhlAng:
Параметры
развернуть все
Оси
Number of axles, NumAxl — Количество осей
scalar
Количество осей, Na, безразмерного.
Number of tracks by axle, NumTracksByAxl — Количество дорожек на ось
vector
Количество дорожек на ось, Nta, безразмерный. Вектором является 1 количеством осей автомобиля, Na. Например, [1,2] представляет одну дорожку на оси 1 и две дорожки на оси 2.
Steered axle enable by axle, StrgEnByAxl — Булев вектор, чтобы включить регулирование оси
vector
Булев вектор, который включает регулирование оси, Ensteer, безразмерный. Вектором является 1 количеством осей автомобиля, Na. Например:
[1 0] — Для автомобиля 2D оси, включает оси 1 регулирование и отключает ось 2 регулирования
[1 1] — Для автомобиля 2D оси, включает оси 1 и оси 2 регулирования
Зависимости
Установка элемента вектора Steered axle enable by axle, StrgEnByAxl к 1:
Например, для автомобиля 2D оси с двумя дорожками на ось, можно ввести держащиеся углы для обоих колес на первой оси.
Чтобы создать порт StrgAng, установите Steered axle enable by axle, StrgEnByAxl на [1 0]. Измерениями массива входного сигнала является [1x2].
Сигнал StrgAng содержит два держащихся угла согласно их оси и местоположениям дорожки.
| Элемент массива | Ось | Дорожка |
|---|
StrgAng(1,1) | 1 | 1 |
StrgAng(1,2) | 1 | 2 |
Axle and wheels lumped principal moments of inertia about longitudinal axis, AxlIxx — Инерция
vector
Ось и колеса смешали основные моменты инерции о продольной оси, AxleIxx a, в kg*m^2.
Вектором является 1 количеством осей автомобиля, Na. Если вы предоставляете скалярное значение, блок использует то значение для всех осей.
Axle and wheels lumped mass, AxlM — Масса
vector
Ось и колеса смешали массу, a, в kg.
Вектором является 1 количеством осей автомобиля, Na. Если вы предоставляете скалярное значение, блок использует то значение для всех осей.
Track hardpoint coordinates relative to axle center, TrackCoords — Точка
array
Отследите координаты hardpoint, Tct, вдоль твердой оси x, y, и осей z, в m.
Например, для автомобиля 2D оси с двумя дорожками на ось, массив TrackCoords:
Размерностями является [3x4].
Содержит четыре, отслеживают координаты hardpoints согласно их оси и отслеживают местоположения.
| Элемент массива | Ось | Дорожка | Ось |
|---|
TrackCoords(1,1) | 1 | 1 | Твердая ось X оси |
TrackCoords(1,2) | 1 | 2 |
TrackCoords(1,3) | 2 | 1 |
TrackCoords(1,4) | 2 | 2 |
TrackCoords(2,1) | 1 | 1 | Твердая ось Y оси |
TrackCoords(2,2) | 1 | 2 |
TrackCoords(2,3) | 2 | 1 |
TrackCoords(2,4) | 2 | 2 |
TrackCoords(3,1) | 1 | 1 | Твердая ось z оси |
TrackCoords(3,2) | 1 | 2 |
TrackCoords(3,3) | 2 | 1 |
TrackCoords(3,4) | 2 | 2 |
Suspension hardpoint coordinates relative to axle center, SuspCoords — Точка
array
Приостановка hardpoint координаты, Sct, вдоль твердой оси x-, y-, и осей z, в m.
Например, для автомобиля 2D оси с двумя дорожками на ось, массив SuspCoords:
Размерностями является [3x4].
Содержит четыре, отслеживают координаты hardpoints согласно их оси и отслеживают местоположения.
| Элемент массива | Ось | Дорожка | Ось |
|---|
SuspCoords(1,1) | 1 | 1 | Твердая ось X оси |
SuspCoords(1,2) | 1 | 2 |
SuspCoords(1,3) | 2 | 1 |
SuspCoords(1,4) | 2 | 2 |
SuspCoords(2,1) | 1 | 1 | Твердая ось Y оси |
SuspCoords(2,2) | 1 | 2 |
SuspCoords(2,3) | 2 | 1 |
SuspCoords(2,4) | 2 | 2 |
SuspCoords(3,1) | 1 | 1 | Твердая ось z оси |
SuspCoords(3,2) | 1 | 2 |
SuspCoords(3,3) | 2 | 1 |
SuspCoords(3,4) | 2 | 2 |
Wheel and axle interface compliance constant, KzWhlAxl — Коэффициент упругости
scalar
Колесо и ось соединяют интерфейсом с постоянным соответствием, Kz, в N/m.
Wheel and axle interface compliance preload, F0zWhlAxl — Коэффициент упругости
scalar
Колесо и ось соединяют интерфейсом с предварительной нагрузкой соответствия, F0z, в N.
Wheel and axle interface damping constant, CzWhlAxl — Затухание
scalar
Колесо и интерфейс оси затухание постоянного, Cz, в m.
Приостановка
Соответствие и ослабляющий - пассивный
Suspension spring constant, Kz — Постоянная пружина подвески
scalar | vector
Линейный вертикальный коэффициент упругости для независимой подвески отслеживает на оси a, kza, в N/m.
Вектором является 1 количеством осей автомобиля, Na. Если вы предоставляете скалярное значение, блок использует то значение для всех осей.
Suspension spring preload, F0z — Предварительная нагрузка пружины подвески
scalar | vector
Вертикальная сила пружины предварительной нагрузки применилась к колесам на оси в координатах ссылки поставщика услуг колеса, Fz0a, в N. Положительные силы предварительной нагрузки:
Вектором является 1 количеством осей автомобиля, Na. Если вы предоставляете скалярное значение, блок использует то значение для всех осей.
Suspension shock damping constant, Cz — Шок приостановки, ослабляющий постоянный
scalar | vector
Линейное вертикальное затухание, постоянное для независимой подвески, отслеживает на оси a, cza, в нс/м.
Вектором является 1 количеством осей автомобиля, Na. Если вы предоставляете скалярное значение, блок использует то значение для всех осей.
Зависимости
Чтобы создать этот параметр, очистите Enable active damping.
Suspension maximum height, Hmax — Высота
scalar | vector
Максимальное расширение приостановки или минимальная высота сжатия приостановки, Hmax, для оси a перед приостановкой достигают hardstop в m.
Вектором является 1 количеством осей автомобиля, Na. Если вы предоставляете скалярное значение, блок использует то значение для всех осей.
Ссылки
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 2008.
[3] Технический Комитет. Дорожные автомобили — Динамика аппарата и способность устойчивости движения — Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011.
Расширенные возможности
Генерация кода C/C++
Генерация кода C и C++ с помощью Simulink® Coder™.
Введенный в R2018a