Сопоставленная серьезная приостановка оси
Vehicle Dynamics Blockset / Приостановка
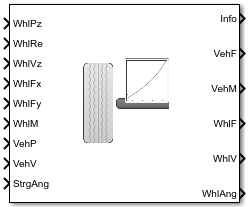
Блок Solid Axle Suspension - Mapped реализует сопоставленную серьезную приостановку оси для нескольких осей с несколькими дорожками на ось.
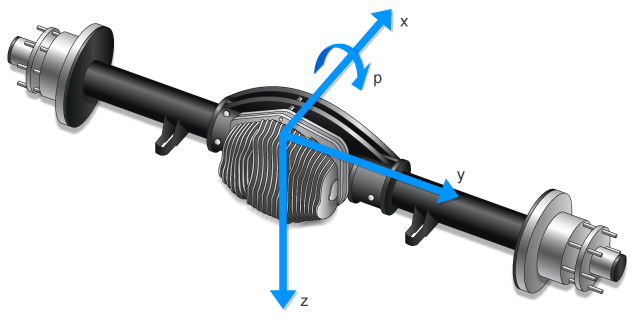
Блок моделирует соответствие приостановки, затухание и геометрические эффекты как функции положений дорожки и скоростей, со специфичным для оси соответствием и затуханием параметров. Используя положение дорожки и скорость, блок вычисляет вертикальное положение дорожки и силы приостановки на автомобиле и колесе. Блок использует Z-down (заданный в SAE J670) и твердая система координат оси. Твердая система координат оси, показанная здесь, выравнивается с системой координат автомобиля Z-down с осью X в направлении прямого движения автомобиля.
| Для каждого | Можно задать |
|---|---|
|
Ось |
|
|
Дорожка |
|
Блок содержит хранящие энергию пружинные элементы и рассеивающие энергию элементы демпфера. Блок также хранит энергию через угловое ускорение списка оси и центр оси массового вертикального и поперечного ускорения.
Эта таблица суммирует настройки параметров блоков для автомобиля с:
Две оси.
Две дорожки на ось.
Регулирование угла вводится для обеих дорожек на передней оси.
| Параметр | Установка |
|---|---|
| Number of axles, NumAxl | 2 |
Number of tracks by axle, NumTracksByAxl | [2 2] |
| Steered axle enable by axle, StrgEnByAxl | [1 0] |
Блок использует интерполяционную таблицу, которая связывает вертикальное затухание и соответствие к высоте приостановки, скорости изменения высоты приостановки и регулированию угла. Можно калибровать интерполяционную таблицу силы колеса так, чтобы держащиеся угловые изменения от номинального центрального положения сгенерировали силу, которая увеличивает высоту автомобиля. А именно, блок:
|
Использование |
Вычислять |
|---|---|
|
|
Чтобы вычислить динамику оси, блок реализует эти уравнения. Блок пропускает эффекты:
Ответвление и продольная переводная скорость.
Угловая скорость о вертикальных и боковых осях.
Для сил и моменты, блок использует интерполяционные таблицы.
Силы приостановки и моменты обратились к автомобилю, равны силам приостановки, и моменты применились к колесу.
Уравнения используют эти переменные.
| Fwza,t, Mwza,t | Сила приостановки и момент применилась к колесу на оси |
| Fwxa,t, Mwxa,t | Сила приостановки и момент применилась к колесу на оси |
| Fwya,t, Mwya,t | Сила приостановки и момент применилась к колесу на оси |
| Fvza,t, Mvza,t | Сила приостановки и момент применилась к автомобилю на оси |
| Fvxa,t, Mvxa,t | Сила приостановки и момент применилась к автомобилю на оси |
| Fvya,t, Mvya,t | Сила приостановки и момент применилась к автомобилю на оси |
| Fz0a | Вертикальная сила предварительной нагрузки пружины подвески применилась к колесам на оси |
| kza | Вертикальный коэффициент упругости применился к дорожкам на оси |
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в поставщике услуг колеса для дорожек на оси |
| δsteera,t | При регулировании углового входа для оси |
| cza | Вертикальное постоянное затухание применилось к дорожкам на оси |
| Rewa,t | Эффективный радиус колеса для оси |
| Fzhstopa,t | Вертикальная сила hardstop в оси |
| Fzaswya,t | Вертикальная сила антивлияния в оси |
| zva,t, żva,t | Смещение автомобиля и скорость в оси |
| zwa,t, żwa,t | Отследите смещение и скорость в оси |
| xva,t, ẋva,t | Смещение автомобиля и скорость в оси |
| xwa,t, ẋwa,t | Отследите смещение и скорость в оси |
| yva,t, ẏva,t | Смещение автомобиля и скорость в оси |
| ywa,t, ẏwa,t | Отследите смещение и скорость в оси |
| Ha,t | Высота приостановки в оси |
| Rewa,t | Эффективный радиус колеса в оси a, отследите t |
Чтобы вычислить изгиб, литейщика и углы пальца ноги, блок использует интерполяционную таблицу, Galookup, который является функцией высоты приостановки и держащегося угла.
Уравнения используют эти переменные.
| ξa,t | Угол изгиба колеса на оси |
| ηa,t | Угол литейщика колеса на оси |
| ζa,t | Угол пальца ноги колеса на оси |
| δsteera,t | При регулировании углового входа для оси |
| zva,t | Смещение автомобиля в оси |
| zwa,t | Смещение колеса в оси |
Опционально, можно ввести держащиеся углы для дорожек. Чтобы вычислить держащиеся углы для колес, блок смещает входные руководящие углы как функцию высоты приостановки. Для вычисления блок использует интерполяционную таблицу, Galookup, который является функцией положения приостановки и держащегося угла.
Уравнение использует эти переменные.
| δwhlsteera,t |
Руководящий угол колеса для оси |
| δsteera,t |
При регулировании углового входа для оси |
| zva,t |
Смещение автомобиля в оси |
| zwa,t |
Смещение колеса в оси |
Блок вычисляет эти характеристики приостановки для каждой оси, a, дорожки, t.
| Вычисление | Уравнение |
|---|---|
Рассеянная степень, Psuspa,t | |
Поглощенная энергия, Esuspa,t | |
Высота приостановки, Ha,t | |
Расстояние от поставщика услуг колеса центрируется к интерфейсу шины/дороги |
Уравнения используют эти переменные.
| mhsteera | Регулирование угла к вертикальному наклону силы, примененному в поставщике услуг колеса для дорожек на оси |
| δsteera,t | При регулировании углового входа для оси |
| Rewa,t | Ось |
| f_susp_dz_bp |
Вертикальные точки останова высоты приостановки оси |
| zwtra,t |
Расстояние от поставщика услуг колеса центрируется к интерфейсу шины/дороги вдоль зафиксированной автомобилем оси z |
| zva,t, żva,t | Смещение автомобиля и скорость в оси |
| zwa,t, żwa,t | Отследите смещение и скорость в оси |
[1] Гиллеспи, Томас. Основные принципы динамики аппарата. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 1992.
[2] Комитет по стандартам динамики аппарата. Терминология динамики аппарата. SAE J670. Варрендэйл, PA: ассоциация инженеров автомобилестроения, 2008.
[3] Технический Комитет. Дорожные автомобили — Динамика аппарата и способность устойчивости движения — Словарь. ISO 8855:2011. Женева, Швейцария: Международная организация по стандартизации, 2011.
Серьезная приостановка оси | Серьезная приостановка оси - спиральная пружина | Серьезная приостановка оси - листовая рессора
