Задайте фильтр для использования с интегральными изображениями
Этот объект описывает фильтры поля для использования с интегральными изображениями.
intKernel = integralKernel( заданная ориентация.bbox,weights,orientation)
bbox — Ограничительные рамкиОграничительные рамки, заданные как любой с 4 элементами [x, y, width, height] вектор или M-by-4 матрица отдельных ограничительных рамок. Ограничительная рамка задает фильтр. (x, y) координаты представляют самый верхний угол ядра. (width, height) элементы представляют ширину и высоту соответственно. При определении ограничительных рамок, когда M-by-4 матрица особенно полезен для построения подобных Хаару функций, состоявших из нескольких прямоугольников.
Суммы вычисляются по областям, заданным bbox. Ограничительные рамки могут наложиться. Смотрите Задают 11 11 Средний Фильтр для примера того, как задать фильтр поля.
weights — ВесаВеса, заданные как M - вектор длины весов, соответствующих ограничительным рамкам.
Например, обычный фильтр с коэффициентами:
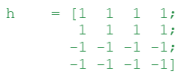
и две области:
| область 1: x=1, y=1, ширина = 4, высота = 2 |
| область 2: x=1, y=3, ширина = 4, высота = 2 |
boxH = integralKernel([1 1 4 2; 1 3 4 2], [1, -1])
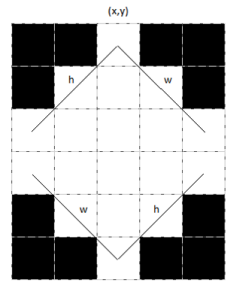
orientation — Отфильтруйте ориентацию'upright' | 'rotated'Отфильтруйте ориентацию, заданную как вектор символов 'upright' или 'rotated'. Когда вы устанавливаете ориентацию на 'rotated', (x, y), компоненты относятся к местоположению верхнего левого угла ограничительной рамки. (width, height) компоненты относятся к строке на 45 градусов от верхнего левого угла ограничительной рамки.
Эти свойства только для чтения.
BoundingBoxes — Ограничительные рамкиОграничительные рамки, сохраненные как любой с 4 элементами [x, y, width, height] вектор или M-by-4 матрица отдельных ограничительных рамок.
Weights — ВесаВеса, сохраненные как вектор, содержащий вес для каждой ограничительной рамки. Веса используются, чтобы задать коэффициенты фильтра.
Coefficients — Отфильтруйте коэффициентыОтфильтруйте коэффициенты, сохраненные как числовое значение.
Центр Центр фильтраЦентр фильтра, сохраненный как [x, y] координаты. Центр фильтра представляет центр ограничительного прямоугольника. Это вычисляется путем сокращения вдвое размерностей прямоугольника. Для даже размерных прямоугольников центр размещается в субпиксельные местоположения. Следовательно, это окружено к следующему целому числу.
Например, для этого фильтра, центр в [3,3].
Эти координаты находятся на пробеле ядра, где верхний левый угол (1,1). Чтобы разместить центр в другое место, обеспечьте соответствующую спецификацию ограничительной рамки. Для этого фильтра лучший рабочий процесс должен был бы создать вертикальное ядро и затем вызвать метод rot45, чтобы обеспечить вращаемую версию.
Размер Отфильтруйте размерОтфильтруйте размер, сохраненный как вектор с 2 элементами. Размер ядра вычисляется, чтобы быть размерностями прямоугольника, который ограничивает ядро. Для одного вектора ограничительной рамки [x, y, width, height], ядро ограничено в прямоугольнике размерностей [(width +height) (width +height)-1].
Для каскадных прямоугольников самый низкий угол самого нижнего прямоугольника задает размер. Например, фильтр со спецификацией ограничительной рамки [3 1 3 3], с набором весов к 1, производит 6 5 фильтр с этим ядром:
Orientation — Отфильтруйте ориентацию'upright' (значение по умолчанию) | 'rotated'Отфильтруйте ориентацию, сохраненную как вектор символов 'upright' или 'rotated'.
| rot45 | Вращает вертикальное ядро по часовой стрелке 45 градусами |
| перемещение | Транспонируйте фильтр |
avgH = integralKernel([1 1 11 11], 1/11^2);
ydH = integralKernel([1,1,5,9;1,4,5,3], [1, -3]);
Можно также задать этот фильтр как integralKernel ([1,1,5,3; 1,4,5,3; 1,7,5,3], [1,-2, 1]); |. Это определение фильтра менее эффективно, потому что требуется три ограничительных рамки.
Визуализируйте фильтр.
ydH.Coefficients
ans = 9×5
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
-2 -2 -2 -2 -2
-2 -2 -2 -2 -2
-2 -2 -2 -2 -2
1 1 1 1 1
1 1 1 1 1
1 1 1 1 1
Создайте фильтр.
K = integralKernel([3,1,3,3;6 4 3 3], [1 -1], 'rotated');Визуализируйте фильтр и отметьте центр.
imshow(K.Coefficients, [], 'InitialMagnification', 'fit'); hold on; plot(K.Center(2),K.Center(1), 'r*'); impixelregion;


Считайте и отобразите входное изображение.
I = imread('pout.tif');
imshow(I);
Вычислите интегральное изображение.
intImage = integralImage(I);
Примените 7 7 средний фильтр.
avgH = integralKernel([1 1 7 7], 1/49); J = integralFilter(intImage, avgH);
Бросьте результат назад к тому же классу как входное изображение.
J = uint8(J); figure imshow(J);

Виола, Пол и Майкл Дж. Джонс. “Быстрое Обнаружение объектов с помощью Повышенного Каскада Простых Функций”. Продолжения 2 001 Конференции Общества эпохи компьютеризации IEEE по Компьютерному зрению и Распознаванию образов. Издание 1, 2001, стр 511–518.
SURFPoints | detectMSERFeatures | detectSURFFeatures | integralFilter | integralImage
