Найдите шаблон в изображении
Analysis & Enhancement
visionanalysis
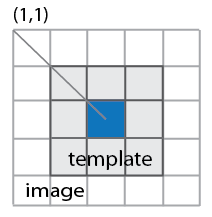
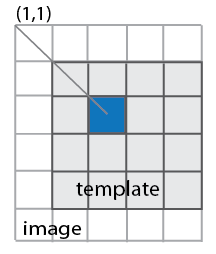
Блок Template Matching находит лучшее соответствие шаблона во входном изображении. Блок вычисляет метрические значения соответствия путем сдвига шаблона по видимой области или целому изображению, и затем находит лучшее местоположение соответствия.
| Порт | Поддерживаемые типы данных |
|---|---|
| I (входное изображение) |
|
| T (Шаблон) |
|
| ROI (видимая область, [x y высота ширины]) |
|
| Metric (совпадают с метрическими значениями), |
|
| Loc (Лучше всего совпадают с местоположением [x y]), |
|
| NMetric (Метрические значения в Окружении лучшего соответствия) |
|
| NValid (Допустимое окружение) |
|
| ROIValid (допустимый ROI) |
|
Метрики соответствия используют разностное уравнение с общей формой:
обозначает метрическое пространство для
n > 1.
Сумма абсолютных разностей (SAD)
Эта метрика также известна как Такси или манхэттенскую метрику Расстояния. Это суммирует абсолютные значения различий между пикселями в оригинальном изображении и соответствующими пикселями в изображении шаблона. Эта метрика норма изображения различия. Самый низкий счет SAD оценивает лучшее положение шаблона в поисковом изображении. Общая метрика расстояния SAD становится:
Сумма различий в квадрате (SSD)
Эта метрика также известна как метрику Euclidean Distance . Это суммирует квадрат абсолютных разностей между пикселями в оригинальном изображении и соответствующими пикселями в изображении шаблона. Эта метрика является квадратом норма изображения различия. Общая метрика расстояния SSD становится:
Максимальная абсолютная разность (MaxAD)
Эта метрика также известна the Uniform Distance метрика. Это суммирует максимум абсолютных значений различий между пикселями в оригинальном изображении и соответствующими пикселями в изображении шаблона. Эта метрика расстояния обеспечивает норма изображения различия. Общая метрика расстояния MaxAD становится:
который упрощает до:
Выберите один из трех типов метрик соответствия:
Sum of absolute differences (SAD)
Sum of squared differences (SSD)
Maximum absolute difference (MaxAD)
Выберите один из двух выходных типов:
Match metric
Выберите эту опцию, чтобы вывести метрическую матрицу соответствия. Эта опция добавляет выходной порт Metric в блок.
Best match location
Выберите эту опцию, чтобы вывести [x y] координаты для местоположения лучшего соответствия. Эта опция добавляет выходной порт Loc в блок. Когда вы выбираете Best match location, Search method, Output NxN matrix of metric values around best match, и опции параметра Enable ROI processing появляются.
Эта опция появляется, когда вы выбираете Best match location для параметра Output. Выберите один из двух методов поиска.
Exhaustive
Three-step
Эта опция появляется, когда вы выбираете Best match location для параметра Output. Установите флажок, чтобы вывести матрицу метрических значений, сосредоточенных вокруг лучшего соответствия. Когда вы делаете так, блок добавляет выходные порты NValid и NMetric.
Эта опция появляется, когда вы устанавливаете флажок Output NxN matrix of metric values around best match. Введите целый номер, который определяет размер N на n выходной матрицы, сосредоточенной вокруг лучшего индекса местоположения соответствия. N должен быть нечетным числом.
Эта опция появляется, когда вы выбираете Best match location для параметра Output. Установите флажок для блока Template Matching, чтобы выполнить обработку видимой области. Когда вы делаете так, блок добавляет входной порт ROI, и флажок Output flag indicating if ROI is valid появляется. Вход ROI должен иметь формат [x y высота ширины], где [x y] координаты верхнего левого угла ROI.
Эта опция появляется, когда вы устанавливаете флажок Enable ROI processing. Установите флажок для блока Template Matching, чтобы указать, является ли ROI в допустимой области границы изображения. Когда вы делаете так, блок добавляет выходной порт ROIValid.
Выберите Rounding Modes для операций фиксированной точки.
Выберите этот режим, чтобы насыщать на целочисленном переполнении. Смотрите режим Overflow для операций фиксированной точки.
Используйте этот параметр, чтобы задать, как требуется определять слово аккумулятора и дробные длины.
Когда вы выбираете Binary point scaling, можно ввести Word length и Fraction length аккумулятора в битах.
Когда вы выбираете Same as first input, характеристики совпадают с характеристиками первого входа. Смотрите Типы данных Умножения для рисунков, изображающих использование типа данных аккумулятора в этом блоке:
Когда вы выбираете Slope and bias scaling, можно ввести Word length в битах и Slope Accumulator. Все сигналы в программном обеспечении Computer Vision Toolbox™ имеют смещение 0.
Блок бросает входные параметры к Accumulator к типу данных аккумулятора. Это добавляет каждый элемент входа к выводу сумматора, который остается в типе данных аккумулятора. Используйте этот параметр, чтобы задать, как определять это слово аккумулятора и дробные длины.
Выберите, как задать Word length, Fraction length и Slope Template Matching вывод:
Когда вы выбираете Same as first input, эти характеристики совпадают с характеристиками аккумулятора.
Когда вы выбираете Binary point scaling, можно ввести Word length and Fraction length вывода в битах.
Когда вы выбираете Slope and bias scaling, можно ввести Word length в битах и Slope вывода. Все сигналы в программном обеспечении Computer Vision Toolbox имеют смещение 0.
Параметр Output на панели Типов данных появляется, когда вы выбираете Metric matrix или если вы выбираете Best match location, и флажок Output NxN matrix of metric values around best match устанавливается.
Выберите этот параметр, чтобы препятствовать тому, чтобы Fixed-Point Tool заменили типы данных, которые вы задаете на маске блока. Для получения дополнительной информации смотрите fxptdlg, страницу с описанием на Fixed-Point Tool в документации Simulink®.
[1] Кога Т., и. Эл. Компенсированное движению межкадровое кодирование для организации видеоконференций. На Национальной Телекоммуникационной Конференции. Ноябрь 1981, G5.3.1–5, Новый Орлеан, ЛА
[2] Закай М., “Общая Транзакция IEEE” критериев расстояния на Теории информации, стр 94–95, январь 1964.
[3] Ю, J., Дж. Амоурс, Н. Себ, Ц. Тянь, "Новое исследование метрик расстояния как международная конференция IEEE" измерения подобия по вопросам мультимедиа и Экспо, 2006.
Image Processing Toolbox™ | |
| Computer Vision Toolbox |