Находящиеся на диске запасы устойчивости обратной связи
[ вычисляет находящиеся на диске запасы устойчивости для SISO или цикла отрицательной обратной связи MIMO DM,MM] = diskmargin(L)feedback(L,eye(N)), где N количество вводов и выводов в L.
diskmargin команда возвращает цикл за один раз запасы устойчивости в DM и многоконтурные поля в MM. Находящийся на диске граничный анализ обеспечивает более сильную гарантию устойчивости, чем классические запасы по амплитуде и фазе. Для получения общей информации о дисковых полях, смотрите, что Анализ Устойчивости Использует Дисковые Поля.
Используйте diskmargin вычислить цикл за один раз и многоконтурные дисковые поля. Этот пример иллюстрирует, что цикл за один раз поля может дать чрезмерно оптимистическую оценку истинной робастности обратной связи MIMO. Поля отдельных циклов могут быть чувствительны к небольшим возмущениям в других циклах.
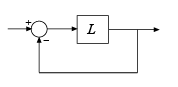
Рассмотрите систему с обратной связью следующего рисунка.

P и C 2 на 2 (MIMO) системы. Создайте P в форме пространства состояний и вычислите находящиеся на диске поля на объекте выход.
a = [0 10;-10 0]; b = eye(2); c = [1 8;-10 1]; d = zeros(2,2); P = ss(a,b,c,d); C = [1 -2;0 1]; L = P*C; [DM,MM] = diskmargin(L);
Исследуйте цикл за один раз дисковые поля, возвращенные в массиве структур DM. Каждая запись в этом массиве структур содержит запасы устойчивости соответствующего канала.
DM(1)
ans = struct with fields:
GainMargin: [0 Inf]
PhaseMargin: [-90 90]
DiskMargin: 2
LowerBound: 2
UpperBound: 2
Frequency: Inf
DM(2)
ans = struct with fields:
GainMargin: [0 Inf]
PhaseMargin: [-90 90]
DiskMargin: 2
LowerBound: 2
UpperBound: 2
Frequency: Inf
Для каждого канала система с обратной связью остается устойчивой для любого изменения усиления или фазы.
Здесь, усиление и изменения фазы являются моделью неопределенности на объекте. На практике неопределенность объекта влияет на оба канала одновременно. Чтобы оценить запасы устойчивости относительно такой независимой и параллельной неопределенности, исследуйте многоконтурные дисковые поля.
MM
MM = struct with fields:
GainMargin: [0.6071 1.6472]
PhaseMargin: [-27.4762 27.4762]
DiskMargin: 0.4890
LowerBound: 0.4890
UpperBound: 0.4899
Frequency: 0.2250
Результатом является более строгий предел на терпимых изменениях (и таким образом терпимой неопределенности), чем цикл за один раз поля. MM.GainMargin показывает, что, если усиления цикла в обоих каналах умножаются независимо значениями между приблизительно 0,6 и приблизительно 1,6, система с обратной связью, как гарантируют, останется устойчивой. Точно так же устойчивость сохраняется против независимых изменений фазы каждого канала приблизительно ±27.5 °. Частота, на которой происходят эти самые маленькие поля, на уровне 22,5 рад/с.
Может быть полезно вычислить поля во входных параметрах объекта отдельно от тех на объекте выходные параметры, потому что обычно существует неопределенность и в приводах (входные параметры) и в датчиках (выходные параметры). Используя L = P*C вычисляет поля при выходных параметрах. Используйте L = C*P вычислить поля во входных параметрах.
[DMI,MMI] = diskmargin(C*P); DMI(1)
ans = struct with fields:
GainMargin: [0 Inf]
PhaseMargin: [-90 90]
DiskMargin: 2
LowerBound: 2
UpperBound: 2
Frequency: 0
DMI(2)
ans = struct with fields:
GainMargin: [0.4750 2.1053]
PhaseMargin: [-39.1846 39.1846]
DiskMargin: 0.7119
LowerBound: 0.7119
UpperBound: 0.7119
Frequency: 0
При выходных параметрах оба канала обратной связи были устойчивы против любого изменения. Здесь во входных параметрах, однако, второй канал гарантируется устойчивый только для ограниченного диапазона изменений. Многоконтурное поле на объекте ввело, дает к более строгой оценке допуска системы с обратной связью к изменениям во входе к объекту.
MMI
MMI = struct with fields:
GainMargin: [0.7288 1.3721]
PhaseMargin: [-17.8304 17.8304]
DiskMargin: 0.3137
LowerBound: 0.3137
UpperBound: 0.3144
Frequency: 0
Наконец, вычислите многоконтурное поле против одновременных изменений усиления (или фаза) и во входных параметрах объекта и в объекте выходные параметры. Это многоконтурное поле обеспечивает самую консервативную гарантию устойчивости с обратной связью.
MMIO = diskmargin(P,C)
MMIO = struct with fields:
GainMargin: [0.8270 1.2092]
PhaseMargin: [-10.8190 10.8190]
DiskMargin: 0.1894
LowerBound: 0.1894
UpperBound: 0.1898
Frequency: 0
Этот результат показывает, что для независимых и параллельных изменений обоих каналов и при вводах и выводах, устойчивость гарантируется для изменений в усилении цикла фактора между приблизительно 0,83 и 1.2. Аналогично, фаза цикла может варьироваться только приблизительно на ±10.8 °. Частота, на которой происходят самые маленькие поля, является DC.
diskmargin основывает его расчет на переключенной функции чувствительности , где функция чувствительности, и E является параметром эксцентриситета. По умолчанию, E = 0, который соответствует сбалансированной функции чувствительности , где дополнительная функция чувствительности. Установка E = 1 вычисляет дисковые поля на основе S, в то время как E = 1 вычисляет дисковые поля на основе T. Можно попробовать различные значения E и объединить результаты получить менее консервативные запасы устойчивости, чем вы добираетесь от одной только сбалансированной функции чувствительности.
Вычислите поля на основе дополнительной чувствительности, сбалансированной чувствительности и функций чувствительности для системы с передаточной функцией разомкнутого цикла, данной
L = tf(25,[1 10 10 10]); DMt = diskmargin(L,-1); DMb = diskmargin(L); DMs = diskmargin(L,1);
Сравните получившиеся запасы по амплитуде.
DMt.GainMargin
ans = 1×2
0.5136 1.4864
DMb.GainMargin
ans = 1×2
0.6273 1.5942
DMs.GainMargin
ans = 1×2
0.7132 1.6726
Различные значения E дают различные области значений для предполагаемых запасов по амплитуде. Каждый из них является различной оценкой для истинных запасов по амплитуде и каждой устойчивостью гарантий для изменений усиления в его области значений. Поэтому система с обратной связью, как гарантируют, останется устойчивой для всех изменений объединения всех трех областей значений или изменений коэффициента усиления разомкнутого контура фактора между приблизительно 0,51 и приблизительно 1,67.
Для некоторых систем большие положительные или отрицательные значения E могут дать к еще большей области значений гарантируемой устойчивости.
DMnegE = diskmargin(L,-100); DMposE = diskmargin(L,100); DMnegE.GainMargin
ans = 1×2
0.0761 1.0100
DMposE.GainMargin
ans = 1×2
0.9902 1.9109
Эти значения расширяют область значений, таким образом, что устойчивость гарантируется для изменений усиления фактора между приблизительно 0,08 и приблизительно 1,91.
Для получения дополнительной информации об изменении оценок запаса по амплитуде с E, смотрите, что Анализ Устойчивости Использует Дисковые Поля.
L — Ответ разомкнутого циклаОтвет разомкнутого цикла, заданный как модель динамической системы. L может быть SISO или MIMO, пока это имеет то же количество вводов и выводов. diskmargin вычисляет находящиеся на диске запасы устойчивости для отрицательной обратной связи система с обратной связью feedback(L,eye(N)).
Вычислить дисковые поля системы положительной обратной связи feedback(L,eye(N),+1), используйте diskmargin(-L).
Когда у вас есть контроллер P и объект C, можно вычислить дисковые поля для усиления (или фаза) изменения при вводах или выводах объекта, как в следующей схеме.
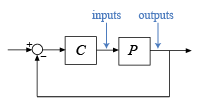
Чтобы вычислить поля на объекте выходные параметры, установите L = P*C.
Чтобы вычислить поля во входных параметрах объекта, установите L = C*P.
L может быть непрерывное время или дискретное время. Если L обобщенная модель в пространстве состояний (genss или uss) затем diskmargin использует текущее значение или номинальную стоимость всех блоков системы управления в L.
Если L модель данных частотной характеристики (такая как frd), затем diskmargin вычисляет поля на каждой частоте, представленной в модели. Функция возвращает поля на частоте с самым маленьким дисковым полем.
Если L массив моделей, затем diskmargin вычисляет поля для каждой модели в массиве.
P — ОбъектОбъект, заданный как модель динамической системы. P может быть SISO или MIMO, настолько же долго как P*C имеет то же количество вводов и выводов. diskmargin вычисляет находящиеся на диске запасы устойчивости для отрицательной обратной связи система с обратной связью. Чтобы вычислить дисковые поля системы с положительной обратной связью, используйте diskmargin(P,-C).
P может быть непрерывное время или дискретное время. Если P обобщенная модель в пространстве состояний (genss или uss) затем diskmargin использует текущее значение или номинальную стоимость всех блоков системы управления в P.
Если P модель данных частотной характеристики (такая как frd), затем diskmargin вычисляет поля на каждой частоте, представленной в модели. Функция возвращает поля на частоте с самым маленьким дисковым полем.
C — КонтроллерКонтроллер, заданный как модель динамической системы. C может быть SISO или MIMO, настолько же долго как P*C имеет то же количество вводов и выводов. diskmargin вычисляет находящиеся на диске запасы устойчивости для отрицательной обратной связи система с обратной связью. Чтобы вычислить дисковые поля системы с положительной обратной связью, используйте diskmargin(P,-C).
C может быть непрерывное время или дискретное время. Если C обобщенная модель в пространстве состояний (genss или uss) затем diskmargin использует текущее значение или номинальную стоимость всех блоков системы управления в C.
Если C модель данных частотной характеристики (такая как frd), затем diskmargin вычисляет поля на каждой частоте, представленной в модели. Функция возвращает поля на частоте с самым маленьким дисковым полем.
E — ЭксцентриситетЭксцентриситет области неопределенности использовался для расчета запасов устойчивости, заданных как действительное скалярное значение. Используйте этот параметр, чтобы варьироваться, форма области неопределенности раньше моделировала изменения фазы и усиление. Варьируясь параметр эксцентриситета дает к более низким оценкам истинных запасов устойчивости, позволяя вам вывести более крупную область гарантируемой устойчивости, чем то полученное использование E по умолчанию = 0. Некоторые специальные значения E включение:
0 — Поля на основе сбалансированной функции чувствительности
1 — Поля на основе функции чувствительности
– 1 — Поля на основе дополнительной функции чувствительности
Для примера смотрите Дисковые Поля На основе Чувствительности и Дополнительной Чувствительности. Для более подробной информации, о как выбор E влияет на граничный расчет, смотрите, что Анализ Устойчивости Использует Дисковые Поля.
diskmargin принимает отрицательную обратную связь. Чтобы вычислить дисковые поля системы положительной обратной связи, используйте diskmargin(-L) или diskmargin(P,-C).
Чтобы вычислить дисковые поля для системы, смоделированной в Simulink®, сначала линеаризуйте модель, чтобы получить ответ разомкнутого цикла в конкретной рабочей точке. Затем используйте diskmargin вычислить запасы устойчивости для линеаризованной системы. Для получения дополнительной информации смотрите Запасы устойчивости Модели Simulink.
Чтобы вычислить классические запасы по амплитуде и фазе, используйте allmargin.
Для SISO L модель неопределенности для граничного диском анализа включает мультипликативную комплексную неопределенность Δ в передаточную функцию цикла можно следующим образом:
Для Δ = 0, мультипликативный фактор равняется 1, соответствуя номинальному L. Когда Δ варьируется по шару | Δ | <α, усиление и фаза мультипликативного фактора являются моделью для усиления и изменения фазы L. Параметр эксцентриситета E варьируется форма прикладной неопределенности в комплексной плоскости. disk margin является самым маленьким радиусом α, в котором система с обратной связью становится нестабильной [1]. От дискового поля α, diskmargin выводит минимальные запасы по амплитуде и фазе.
Для систем MIMO, diskmargin применяет аналогичную модель неопределенности, которая позволяет неопределенности варьироваться независимо по каждому каналу.
Для получения дальнейшей информации о расчете и интерпретации дисковых полей, смотрите, что Анализ Устойчивости Использует Дисковые Поля.
[1] Загубите, степень доктора юридических наук, Р.Л. Дэйли, и Д. Гэнгсаас. "Практический Проект Закона о надзоре для Самолета Используя Многомерные Методы". Международный журнал Управления. Издание 59, Номер 1, 1994, стр 93–137.
