Извлеките компоненты элемента управления SISO из ПИД-регулятора 2-DOF
[ анализирует ПИД-регулятор 2-DOF C,X] =
getComponents(C2,looptype)C2 в два компонента элемента управления SISO. Один из компонентов элемента управления, C, ПИД-регулятор 1-DOF. Другой, X, динамическая система SISO. Когда C и X соединяются в циклической структуре, заданной looptype, получившаяся система с обратной связью эквивалентна циклу управления 2-DOF.
Для получения дополнительной информации об архитектурах управления ПИДа 2-DOF, смотрите ПИД-регуляторы с двумя степенями свободы.
C2 — ПИД-регулятор 2-DOFpid2 возразите | pidstd2 объектПИД-регулятор 2-DOF, чтобы разложиться, заданный как pid2 или pidstd2 объект контроллера.
looptype — Циклическая структура'feedforward' (значение по умолчанию) | 'feedback' | 'filter'Циклическая структура для разложения контроллера 2-DOF, заданного как 'feedforward', 'feedback', или 'filter'. Они соответствуют следующим разложениям управления и архитектуре:
'feedforward' C обычный ПИД-регулятор SISO, который берет сигнал ошибки в качестве его входа. X контроллер feedforward, как показано:
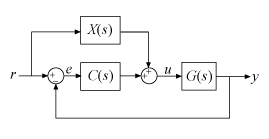
Если C2 непрерывное время, контроллер параллельной формы, затем компонентами дают:
Следующая команда создает систему с обратной связью от r до y для настройки feedforward.
T = G*(C+X)*feedback(1,G*C);
'feedback' C обычный ПИД-регулятор SISO, который берет сигнал ошибки в качестве его входа. X контроллер обратной связи от y до u, как показано:
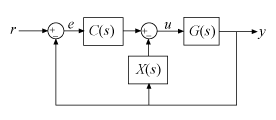
Если C2 непрерывное время, контроллер параллельной формы, затем компонентами дают:
Следующая команда создает систему с обратной связью от r до y для настройки обратной связи.
T = G*C*feedback(1,G*(C+X));
'filter' X предварительный фильтр на ссылочном сигнале. C обычный ПИД-регулятор SISO, который берет в качестве его входа различие между отфильтрованной ссылкой и выходом, как показано:
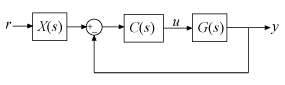
Если C2 непрерывное время, контроллер параллельной формы, затем компонентами дают:
Следующая команда создает систему с обратной связью от r до y для настройки фильтра.
T = X*feedback(G*C,1);
Формулы, показанные выше, принадлежат непрерывному времени, контроллерам параллельной формы. Контроллеры стандартной формы и контроллеры в дискретное время могут быть разложены на аналогичные настройки. getComponents команда работает над всеми объектами ПИД-регулятора 2-DOF.
