Создайте ПИД-регулятор 2-DOF в стандартной форме, преобразуйте в стандартную форму ПИД-регулятор 2-DOF
C2 = pidstd2(Kp,Ti,Td,N,b,c)
C2 = pidstd2(Kp,Ti,Td,N,b,c,Ts)
C2 = pidstd2(sys)
C2 = pid2(___,Name,Value)
pid2 объекты контроллера представляют две степени свободы (2-DOF) ПИД-регуляторы в параллельной форме. Используйте pid2 любой, чтобы создать pid2 объект контроллера от известных коэффициентов или преобразовывать модель динамической системы в pid2 объект.
Две степени свободы (2-DOF) ПИД-регуляторы включают взвешивание заданного значения на пропорциональных и производных условиях. ПИД-регулятор с 2 степенями свободы способен к быстрому подавлению помех без значительного увеличения перерегулирования в отслеживании заданного значения. ПИД-регуляторы 2-DOF также полезны, чтобы смягчить влияние изменений в ссылочном сигнале на управляющем сигнале. Следующий рисунок показывает типичную архитектуру управления с помощью ПИД-регулятора 2-DOF.
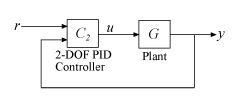
C2 = pidstd2(Kp,Ti,Td,N,b,c)Kp, интегратор и производные постоянные времени Ti, и Td, и производная фильтрует делитель N. У контроллера также есть заданное значение, взвешивающее b на пропорциональном термине и заданном значении, взвешивающем c на производном термине. Отношением между контроллером 2-DOF выход (u) и его два входных параметров (r и y) дают:
Это представление находится в standard form. Если все коэффициенты с действительным знаком, то получившийся C2 pidstd2 объект контроллера. Если один или несколько из этих коэффициентов является настраиваемым (realp или genmat), затем C2 настраиваемое обобщенное пространство состояний (genss) объект модели.
C2 = pidstd2(Kp,Ti,Td,N,b,c,Ts)Ts. Отношением между выходом диспетчера и входными параметрами дают:
IF (z) и DF (z) является discrete integrator formulas для интегратора и производного фильтра. По умолчанию,
Чтобы выбрать различные дискретные формулы интегратора, используйте IFormula и DFormula свойства. (См. Свойства для получения дополнительной информации). Если DFormula = 'ForwardEuler' (значение по умолчанию) и N ≠ Inf, затем Ts, Td, и N должен удовлетворить Td/N > Ts/2. Это требование гарантирует устойчивый производный полюс фильтра.
C2 = pidstd2(sys)sys к стандартной форме pidstd2 объект контроллера.
C2 = pid2(___,Name,Value)Name,Value аргументы.
|
Пропорциональное усиление.
Значение по умолчанию: 1 |
|
Время интегратора.
Когда Значение по умолчанию: |
|
Производное время.
Когда Значение по умолчанию: 0 |
|
Производный делитель фильтра.
Когда Значение по умолчанию: |
|
Взвешивание заданного значения на пропорциональном термине.
Когда Значение по умолчанию: 1 |
|
Взвешивание заданного значения на производном термине.
Когда Значение по умолчанию: 1 |
|
'SampleTime' . Создать дискретное время
Значение по умолчанию: 0 (непрерывное время) |
|
Динамическая система SISO, чтобы преобразовать в стандартный
|
Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
Используйте Name,Value синтаксис, чтобы установить формулы численного интегрирования IFormula и DFormula из дискретного времени pidstd2 контроллер, или установить другие свойства объектов, такие как InputName и OutputName. Для получения информации о доступных свойствах pidstd2 диспетчер возражает, смотрите Свойства.
|
ПИД-регулятор 2-DOF, возвращенный как
|
|
Веса заданного значения на пропорциональных и производных условиях, соответственно. |
|
Пропорциональное усиление. Значение |
|
Время интегратора. |
|
Производное время. |
|
Производный делитель фильтра. |
|
Дискретная формула интегратора IF (z) для интегратора дискретного времени
Когда Значение по умолчанию: |
|
Дискретная формула интегратора DF (z) для производного фильтра дискретного времени
Когда Значение по умолчанию: |
|
Задержка в системе вводится. |
|
Задержка в системе Выход. |
|
'SampleTime' . Для моделей непрерывного времени, Изменение этого свойства не дискретизирует или передискретизирует модель. Используйте Значение по умолчанию: |
|
Модули для переменной времени, шаг расчета
Изменение этого свойства не оказывает влияния на другие свойства, и поэтому изменяет полное поведение системы. Используйте Значение по умолчанию: |
|
Введите название канала, заданное как вектор символов или 2 1 массив ячеек из символьных векторов. Используйте это свойство назвать входные каналы моделей контроллеров. Например, присвойте имена C.InputName = {'setpoint';'measurement'};В качестве альтернативы используйте автоматическое векторное расширение, чтобы присвоить оба входных имени. Например: C.InputName = 'C-input';Входные имена автоматически расширяются до Можно использовать краткое обозначение Входные названия канала имеют несколько использования, включая:
Значение по умолчанию: |
|
Введите модули канала, заданные как 2 1 массив ячеек из символьных векторов. Используйте это свойство отследить модули входного сигнала. Например, присвойте модули C.InputUnit = {'Volts';'mol/m^3'};
Значение по умолчанию: |
|
Введите группы канала. Это свойство не нужно для моделей ПИД-регулятора. Значение по умолчанию: |
|
Выведите название канала, заданное как вектор символов. Используйте это свойство назвать выходной канал моделей контроллеров. Например, присвойте имя C.OutputName = 'control';Можно использовать краткое обозначение Входные названия канала имеют несколько использования, включая:
Значение по умолчанию: Пустой символьный вектор, |
|
Выведите модули канала, заданные как вектор символов. Используйте это свойство отследить модули выходного сигнала. Например, присвойте модуль C.OutputUnit = 'Volts';
Значение по умолчанию: Пустой символьный вектор, |
|
Выведите группы канала. Это свойство не нужно для моделей ПИД-регулятора. Значение по умолчанию: |
|
Имя системы, заданное как вектор символов. Например, Значение по умолчанию: |
|
Любой текст, который вы хотите сопоставить с системой, сохраненной как строка или массив ячеек из символьных векторов. Свойство хранит, какой бы ни тип данных вы обеспечиваете. Например, если sys1.Notes = "sys1 has a string."; sys2.Notes = 'sys2 has a character vector.'; sys1.Notes sys2.Notes
ans =
"sys1 has a string."
ans =
'sys2 has a character vector.'
Значение по умолчанию: |
|
Любой тип данных вы хотите сопоставить с системой, заданной как любой тип данных MATLAB®. Значение по умолчанию: |
|
Выборка сетки для массивов моделей, заданных как структура данных. Для массивов моделей, которые выведены путем выборки одной или нескольких независимых переменных, это дорожки свойства значения переменных, сопоставленные с каждой моделью в массиве. Эта информация появляется, когда вы отображаете или строите массив моделей. Используйте эту информацию, чтобы проследить результаты до независимых переменных. Установите имена полей структуры данных к именам переменных выборки. Установите значения полей к произведенным значениям переменных, сопоставленным с каждой моделью в массиве. Все переменные выборки должны быть числовыми и скаляр, оцененный, и все массивы произведенных значений должны совпадать с размерностями массива моделей. Например, предположите, что вы создаете 11 1 массив линейных моделей, sysarr.SamplingGrid = struct('time',0:10)Точно так же предположите, что вы создаете 6 9 массив моделей, [zeta,w] = ndgrid(<6 values of zeta>,<9 values of w>) M.SamplingGrid = struct('zeta',zeta,'w',w) Когда вы отображаете M M(:,:,1,1) [zeta=0.3, w=5] =
25
--------------
s^2 + 3 s + 25
M(:,:,2,1) [zeta=0.35, w=5] =
25
----------------
s^2 + 3.5 s + 25
...Для массивов моделей, сгенерированных путем линеаризации модели Simulink® в нескольких значениях параметров или рабочих точках, программное обеспечение заполняет Значение по умолчанию: |
Создайте непрерывное время контроллер 2-DOF PDF в стандартной форме. Для этого установите интегральную постоянную времени на Inf. Установите другие усиления и делитель фильтра к требуемым значениям.
Kp = 1; Ti = Inf; % No integrator Td = 3; N = 6; b = 0.5; % setpoint weight on proportional term c = 0.5; % setpoint weight on derivative term C2 = pidstd2(Kp,Ti,Td,N,b,c)
C2 =
s
u = Kp * [(b*r-y) + Td * ------------ * (c*r-y)]
(Td/N)*s+1
with Kp = 1, Td = 3, N = 6, b = 0.5, c = 0.5
Continuous-time 2-DOF PDF controller in standard form
Отображение показывает тип контроллера, формулу и значения параметров, и проверяет, что у контроллера нет термина интегратора.
Создайте дискретное время ПИ-контроллер 2-DOF в стандартной форме, с помощью трапециевидной формулы дискретизации. Задайте формулу с помощью Name,Value синтаксис.
Kp = 1; Ti = 2.4; Td = 0; N = Inf; b = 0.5; c = 0; Ts = 0.1; C2 = pidstd2(Kp,Ti,Td,N,b,c,Ts,'IFormula','Trapezoidal')
C2 =
1 Ts*(z+1)
u = Kp * [(b*r-y) + ---- * -------- * (r-y)]
Ti 2*(z-1)
with Kp = 1, Ti = 2.4, b = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PI controller in standard form
Установка Td = 0 задает ПИ-контроллер без производного термина. Когда отображение показывает, значения N и c не используются в этом контроллере. Отображение также показывает, что трапециевидная формула используется в интеграторе.
Создайте ПИД-регулятор 2-DOF в стандартной форме и установите свойства InputName динамической системы и OutputName. Именование входных параметров и выхода полезно, например, когда вы соединяете ПИД-регулятор с другими моделями динамической системы с помощью connect команда.
C2 = pidstd2(1,2,3,10,1,1,'InputName',{'r','y'},'OutputName','u')
C2 =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 1, Ti = 2, Td = 3, N = 10, b = 1, c = 1
Continuous-time 2-DOF PIDF controller in standard form
ПИД-регулятор с 2 степенями свободы имеет два входных параметров и один выход. Поэтому 'InputName' свойство является массивом, содержащим два имени, один для каждого входа. Отображение модели не показывает имена ввода и вывода для ПИД-регулятора, но можно исследовать значения свойств, чтобы видеть их. Например, проверьте входное имя контроллера.
C2.InputName
ans = 2x1 cell array
{'r'}
{'y'}
Создайте 2 3 сетка ПИ-контроллеров 2-DOF в стандартной форме. Пропорциональное усиление лежит в диапазоне от 1–2 через строки массивов и диапазоны постоянной времени интегратора от 5–9 через столбцы.
Чтобы создать массив ПИД-регуляторов, запустите с массивов, представляющих усиления.
Kp = [1 1 1;2 2 2]; Ti = [5:2:9;5:2:9];
Когда вы передаете эти массивы pidstd2 команда, команда возвращает массив контроллеров.
pi_array = pidstd2(Kp,Ti,0,Inf,0.5,0,'Ts',0.1,'IFormula','BackwardEuler'); size(pi_array)
2x3 array of 2-DOF PID controller. Each PID has 1 output and 2 inputs.
Если вы вводите скалярные значения для некоторых коэффициентов, pidstd2 автоматически расширяет их и присваивает то же значение всем записям в массиве. Например, в этом примере, Td = 0, так, чтобы все записи в массиве были ПИ-контроллерами. Кроме того, все записи в массиве имеют b = 0.5.
Доступ к записям в массиве с помощью индексации массива. Для массивов динамической системы первые две размерности являются размерностями ввода-вывода модели, и остальные измерения являются измерениями массива. Поэтому следующая команда извлекает (2,3) запись в массиве.
pi23 = pi_array(:,:,2,3)
pi23 =
1 Ts*z
u = Kp * [(b*r-y) + ---- * ------ * (r-y)]
Ti z-1
with Kp = 2, Ti = 9, b = 0.5, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PI controller in standard form
Можно также создать массив ПИД-регуляторов с помощью stack команда.
C2 = pidstd2(1,5,0.1,Inf,0.5,0.5); % PID controller C2f = pidstd2(1,5,0.1,0.5,0.5,0.5); % PID controller with filter pid_array = stack(2,C2,C2f); % stack along 2nd array dimension
Эти команды возвращаются 1 2 массив контроллеров.
size(pid_array)
1x2 array of 2-DOF PID controller. Each PID has 1 output and 2 inputs.
Все ПИД-регуляторы в массиве должны иметь тот же шаг расчета, дискретные формулы интегратора и свойства динамической системы, такие как InputName и OutputName.
Преобразуйте параллельную форму pid2 контроллер к стандартной форме.
Параллельная форма ПИДа выражает действия контроллера в терминах пропорционального, интеграла, и производная получает Kp, Ki, и Kd, и отфильтруйте постоянную времени Tf. Можно преобразовать параллельную форму pid2 контроллер к стандартной форме с помощью pidstd2 команда, при условии, что оба из следующего верны:
pid2 контроллер может быть выражен в допустимой стандартной форме.
Усиления Kp, Ki, и Kd из pid2 контроллер у всех есть тот же знак.
Например, рассмотрите следующий контроллер параллельной формы.
Kp = 2; Ki = 3; Kd = 4; Tf = 2; b = 0.1; c = 0.5; C2_par = pid2(Kp,Ki,Kd,Tf,b,c)
C2_par =
1 s
u = Kp (b*r-y) + Ki --- (r-y) + Kd -------- (c*r-y)
s Tf*s+1
with Kp = 2, Ki = 3, Kd = 4, Tf = 2, b = 0.1, c = 0.5
Continuous-time 2-DOF PIDF controller in parallel form.
Преобразуйте этот контроллер, чтобы быть параллельными форме с помощью pidstd2.
C2_std = pidstd2(C2_par)
C2_std =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 2, Ti = 0.667, Td = 2, N = 1, b = 0.1, c = 0.5
Continuous-time 2-DOF PIDF controller in standard form
Отображение подтверждает форму нового стандарта. График отклика подтверждает, что две формы эквивалентны.
bodeplot(C2_par,'b-',C2_std,'r--') legend('Parallel','Standard','Location','Southeast')

Преобразуйте 2D вход, динамическая система непрерывного времени с одним выходом, которая представляет ПИД-регулятор 2-DOF стандартной форме pidstd2 контроллер.
Следующие матрицы пространства состояний представляют ПИД-регулятор 2-DOF.
A = [0,0;0,-8.181]; B = [1,-1;-0.1109,8.181]; C = [0.2301,10.66]; D = [0.8905,-11.79]; sys = ss(A,B,C,D);
Перепишите sys в терминах параметров ПИДа стандартной формы Kpti , Td, и N, и веса заданного значения b и c.
C2 = pidstd2(sys)
C2 =
1 1 s
u = Kp * [(b*r-y) + ---- * --- * (r-y) + Td * ------------ * (c*r-y)]
Ti s (Td/N)*s+1
with Kp = 1.13, Ti = 4.91, Td = 1.15, N = 9.43, b = 0.66, c = 0.0136
Continuous-time 2-DOF PIDF controller in standard form
Преобразуйте динамическую систему дискретного времени, которая представляет ПИД-регулятор 2-DOF с производным фильтром к стандартному pidstd2 форма.
Следующие матрицы пространства состояний представляют дискретное время ПИД-регулятор 2-DOF с шагом расчета 0,05 с.
A = [1,0;0,0.6643]; B = [0.05,-0.05; -0.004553,0.3357]; C = [0.2301,10.66]; D = [0.8905,-11.79]; Ts = 0.05; sys = ss(A,B,C,D,Ts);
Когда вы преобразуете sys к форме ПИДа 2-DOF зависит результат, на которых дискретных формулах интегратора вы задаете для преобразования. Например, используйте значение по умолчанию, ForwardEuler, и для интегратора и для производной.
C2fe = pidstd2(sys)
C2fe =
1 Ts 1
u = Kp * [(b*r-y) + ---- * ------ * (r-y) + Td * --------------- * (c*r-y)]
Ti z-1 (Td/N)+Ts/(z-1)
with Kp = 1.13, Ti = 4.91, Td = 1.41, N = 9.43, b = 0.66, c = 0.0136, Ts = 0.05
Sample time: 0.05 seconds
Discrete-time 2-DOF PIDF controller in standard form
Теперь преобразуйте использование Trapezoidal формула.
C2trap = pidstd2(sys,'IFormula','Trapezoidal','DFormula','Trapezoidal')
C2trap =
1 Ts*(z+1) 1
u = Kp * [(b*r-y) + ---- * -------- * (r-y) + Td * ----------------------- * (c*r-y)]
Ti 2*(z-1) (Td/N)+Ts/2*(z+1)/(z-1)
with Kp = 1.12, Ti = 4.89, Td = 1.41, N = 11.4, b = 0.658, c = 0.0136, Ts = 0.05
Sample time: 0.05 seconds
Discrete-time 2-DOF PIDF controller in standard form
Отображения показывают различие в получившихся содействующих значениях и функциональной форме.
Для некоторых динамических систем, пытаясь использовать Trapezoidal или BackwardEuler формулы интегратора дают к недопустимым результатам, таким как отрицательный Ti, Td, или N значения. В таких случаях, pidstd2 возвращает ошибку.
Дискретизируйте стандартную форму непрерывного времени ПИД-регулятор 2-DOF и задайте интегральные и производные формулы фильтра.
Создайте непрерывное время pidstd2 контроллер и дискретизирует, это с помощью метода "нулевой порядок содержит" c2d команда.
C2con = pidstd2(10,5,3,0.5,1,1); % continuous-time 2-DOF PIDF controller C2dis1 = c2d(C2con,0.1,'zoh')
C2dis1 =
1 Ts 1
u = Kp * [(b*r-y) + ---- * ------ * (r-y) + Td * --------------- * (c*r-y)]
Ti z-1 (Td/N)+Ts/(z-1)
with Kp = 10, Ti = 5, Td = 3.03, N = 0.5, b = 1, c = 1, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in standard form
Отображение показывает тот c2d вычисляет новые коэффициенты ПИДа для контроллера дискретного времени.
Дискретные формулы интегратора дискретизированного контроллера зависят от c2d метод дискретизации, как описано в Советах. Для zoh метод, оба IFormula и DFormula ForwardEuler.
C2dis1.IFormula
ans = 'ForwardEuler'
C2dis1.DFormula
ans = 'ForwardEuler'
Если вы хотите использовать различные формулы от тех возвращенных c2d, затем можно непосредственно установить Ts, IFormula, и DFormula свойства контроллера к требуемым значениям.
C2dis2 = C2con; C2dis2.Ts = 0.1; C2dis2.IFormula = 'BackwardEuler'; C2dis2.DFormula = 'BackwardEuler';
Однако эти команды не вычисляют новые коэффициенты для дискретизированного контроллера. Чтобы видеть это, исследуйте C2dis2 и сравните коэффициенты с C2con и C2dis1.
C2dis2
C2dis2 =
1 Ts*z 1
u = Kp * [(b*r-y) + ---- * ------ * (r-y) + Td * ----------------- * (c*r-y)]
Ti z-1 (Td/N)+Ts*z/(z-1)
with Kp = 10, Ti = 5, Td = 3, N = 0.5, b = 1, c = 1, Ts = 0.1
Sample time: 0.1 seconds
Discrete-time 2-DOF PIDF controller in standard form
Чтобы спроектировать ПИД-регулятор для конкретного объекта, используйте pidtune или pidTuner. Чтобы создать настраиваемый ПИД-регулятор 2-DOF как блок системы управления, используйте tunablePID2.
Повредить контроллер 2-DOF в два компонента элемента управления SISO, такие как контроллер обратной связи и контроллер feedforward, getComponents использования.
Создайте массивы pidstd2 контроллеры:
Определение значений массивов для одного или нескольких коэффициентов Kpti , TdNB, и c.
Определение массива динамических систем sys преобразовывать в pid2 диспетчер возражает.
Используя stack создавать массивы из отдельных контроллеров или меньших массивов.
Передача массива моделей объекта управления к pidtune.
В массиве pidstd2 контроллеры, у каждого контроллера должен быть тот же шаг расчета Ts и дискретные формулы интегратора IFormula и DFormula.
Чтобы создать или преобразовать в контроллер параллельной формы, используйте pid2. Параллельная форма выражает действия контроллера в терминах пропорционального, интеграла, и производная получает Kp, Ki и Kd и постоянную времени фильтра Tf. Например, отношением между входными параметрами и выходом параллельной формы непрерывного времени ПИД-регулятор 2-DOF дают:
Существует два способа дискретизировать непрерывное время pidstd2 контроллер:
Используйте c2d команда. c2d вычисляет новые значения параметров для дискретизированного контроллера. Дискретные формулы интегратора дискретизированного контроллера зависят от c2d метод дискретизации вы используете, как показано в следующей таблице.
c2d Метод дискретизации | IFormula | DFormula |
|---|---|---|
'zoh' | ForwardEuler | ForwardEuler |
'foh' | Trapezoidal | Trapezoidal |
'tustin' | Trapezoidal | Trapezoidal |
'impulse' | ForwardEuler | ForwardEuler |
'matched' | ForwardEuler | ForwardEuler |
Для получения дополнительной информации о c2d методы дискретизации, Смотрите c2d страница с описанием. Для получения дополнительной информации о IFormula и DFormula, смотрите Свойства.
Если вы требуете различных дискретных формул интегратора, можно дискретизировать контроллер непосредственно установкой Ts, IFormula, и DFormula к требуемым значениям. (См., Дискретизируют Стандартную Форму ПИД-регулятор 2-DOF.) Однако этот метод не вычисляет новое усиление и постоянные значения фильтра для дискретизированного контроллера. Поэтому этот метод может дать к более плохому соответствию между непрерывным - и дискретным временем pidstd2 контроллеры, чем использование c2d.
getComponents | pid2 | pidTuner | pidstddata2 | pidtune
