Пакет: TuningGoal
Требование чувствительности для настройки системы управления
Используйте TuningGoal.Sensitivity ограничить чувствительность обратной связи к воздействиям. Ограничьте чувствительность быть меньшей, чем одна на частотах, где вам нужно хорошее подавление помех. Используйте эту настраивающую цель для системы управления, настраивающейся с настраивающимися командами, такими как systune или looptune.
Req = TuningGoal.Sensitivity(location,maxsens)maxsens задает максимальную чувствительность как функцию частоты. Можно задать максимальный профиль чувствительности как сглаженную передаточную функцию или делать набросок кусочного ошибочного профиля с помощью frd модель или makeweight команда.
Смотрите getSensitivity для получения дополнительной информации о функциях чувствительности.)
|
Местоположение, в котором ограничивается чувствительность к воздействиям, задало как вектор символов или массив ячеек из символьных векторов, которые идентифицируют одно или несколько местоположений в системе управления, чтобы настроиться. То, какие местоположения доступны, зависит от того, какую систему вы настраиваете:
Если |
|
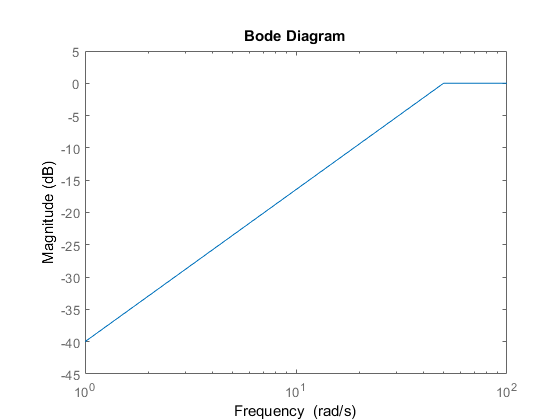
Максимальная чувствительность к воздействиям как функция частоты. Можно задать maxsens = frd([0.01 1 1],[1 50 100]); bodemag(maxsens) ylim([-45,5])
Когда вы используете Если вы настраиваетесь в дискретное время (то есть, с помощью |
|
Максимальная чувствительность как функция частоты, заданной как Программное обеспечение автоматически сопоставляет входной параметр |
|
Диапазон частот, в котором осуществляется настройка цели, задал как вектор-строка из формы Установите Req.Focus = [1,100]; Значение по умолчанию: |
|
Переключитесь для того, чтобы автоматически масштабировать сигналы цикла, заданные как В многоконтурном или системах управления MIMO, каналы обратной связи автоматически повторно масштабируются, чтобы компенсировать недиагональные условия в передаточной функции разомкнутого цикла (периоды взаимодействия цикла). Установите Значение по умолчанию: |
|
Местоположение воздействия, заданного как массив ячеек из символьных векторов, которые идентифицируют одну или несколько аналитических точек в системе управления, чтобы настроиться. Например, если Начальное значение |
|
Модели, к которым настраивающаяся цель применяется, заданный как вектор индексов. Используйте Req.Models = 2:4; Когда Значение по умолчанию: |
|
Обратная связь, чтобы открыться при оценке настраивающейся цели, заданной как массив ячеек из символьных векторов, которые идентифицируют открывающие цикл местоположения. Настраивающаяся цель оценена против настройки разомкнутого цикла, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Если вы используете настраивающуюся цель настроить модель Simulink системы управления, то Если вы используете настраивающуюся цель настроить обобщенное пространство состояний ( Например, если Значение по умолчанию: |
|
Имя настраивающейся цели, заданной как вектор символов. Например, если Req.Name = 'LoopReq'; Значение по умолчанию: |
Создайте настраивающуюся цель, которая ограничивает чувствительность к воздействию во входе объекта следующей системы управления. Система управления содержит аналитическую точку под названием 'X' во входе объекта.

Задайте максимальную чувствительность 0,01 (-40 дБ) на уровне 1 рад/с, увеличившись до 1 прошлого 10 рад/с (на 0 дБ). Используйте frd модель, чтобы делать набросок этой целевой чувствительности.
maxsens = frd([0.01 1 1],[1 10 100]);
Req = TuningGoal.Sensitivity('X',maxsens);Программное обеспечение преобразует maxsens в сглаженную функцию частоты, которая аппроксимирует кусочно заданный профиль усиления. Визуализируйте эту функцию с помощью viewGoal.
viewGoal(Req)

Теневая область указывает на области, где настраивающаяся цель нарушена. Теневая область отличается от заданного профиля усиления (пунктирная линия) в очень низких частотах из-за модификаций, которые программное обеспечение вводит для числовой устойчивости, как описано в Алгоритмах.
Создайте настраивающуюся цель, которая задает максимальную чувствительность 0,1 (10%) на частотах ниже 5 рад/с. Сконфигурируйте настраивающуюся цель применяться только к вторым и третьим моделям объекта управления.
Req = TuningGoal.Sensitivity('u',0.1);
Req.Focus = [0 5];
Req.Models = [2 3];Можно использовать Req как вход к looptune или systune при настройке системы управления, которая имеет аналитическую точку, названную 'u'. Установка Focus свойство ограничивает приложение настраивающейся цели к частотам между 0 и 5 рад/с. Установка Models свойство ограничивает приложение настраивающейся цели к вторым и третьим моделям в массиве, когда вы используете настраивающуюся цель настроить массив моделей системы управления.
Эта настраивающая цель налагает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в Location, оцененный с циклами, открытыми в точках, идентифицирован в Openings. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. MinDecay и MaxRadius опции systuneOptions управляйте границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, используйте systuneOptions изменить эти значения по умолчанию.
Когда вы настраиваете систему управления с помощью TuningGoal, программное обеспечение преобразует настраивающуюся цель в нормированное скалярное значение f (x), где x является вектором свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для TuningGoal.Sensitivity, f (x) дают:
или его эквивалентное дискретное время. Здесь, S (s, x) является функцией чувствительности с обратной связью, измеренной в местоположении, заданном в настраивающейся цели. WS является функцией взвешивания частоты, выведенной из заданного профиля чувствительности. Усиления WS и 1/MaxSensitivity примерно соответствуйте для значений усиления в пределах от-20 дБ к 60 дБ. По числовым причинам функция взвешивания выравнивается вне этой области значений, если заданный профиль чувствительности не изменяет наклон вне этой области значений. Эта корректировка называется regularization. Поскольку полюса WS близко к s = 0 или s = Inf может привести к плохому числовому созданию условий systune задача оптимизации, не рекомендуется задать профили чувствительности с очень низкочастотной или очень высокочастотной динамикой.
Чтобы получить WS, используйте:
WS = getWeight(Req,Ts)
где Req настраивающаяся цель и Ts шаг расчета, в котором вы настраиваетесь (Ts = 0 в течение непрерывного времени). Для получения дополнительной информации о регуляризации и ее эффектах, смотрите, Визуализируют Настраивающиеся Цели.
TuningGoal.Gain | TuningGoal.LoopShape | TuningGoal.MaxLoopGain | TuningGoal.MinLoopGain | TuningGoal.Rejection | evalGoal | looptune | looptune (for slTuner) | slTuner | systune | systune (for slTuner) | viewGoal