Получите контуры маршрута маршрута агента
lbdry = laneBoundaries(ac,Name,Value)laneBoundaries(ac,'AllLaneBoundaries',true) возвращает все контуры маршрута дороги, на которой перемещается агент автомобиля, оборудованного датчиком.
Симулируйте ведущий сценарий с одним автомобилем, перемещающимся на S-кривой. Создайте и постройте контуры маршрута.
Создайте ведущий сценарий с одной дорогой, имеющей S-кривую.
scenario = drivingScenario('StopTime',3);
roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Создайте маршруты и добавьте их в дорогу.
lm = [laneMarking('Solid','Color','w'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Dashed','Color','y'); ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(scenario,roadcenters,'Lanes',ls);
Добавьте автомобиль, оборудованный датчиком и задайте его траекторию от его скорости и waypoints. Автомобиль перемещается на уровне 30 метров в секунду.
car = vehicle(scenario, ... 'ClassID',1, ... 'Position',[-35 20 0]); waypoints = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0]; speed = 30; trajectory(car,waypoints,speed);
Постройте сценарий и соответствующий график преследования.
plot(scenario)

chasePlot(car)

Запустите цикл симуляции.
Инициализируйте видимый с большого расстояния график и создайте плоттер схемы, лево-маршрут и плоттеры контура правильного маршрута и дорожный граничный плоттер.
Получите дорожные контуры и прямоугольные контуры.
Получите контуры маршрута налево и право на транспортное средство.
Усовершенствуйте симуляцию и обновите плоттеры.
bep = birdsEyePlot('XLim',[-40 40],'YLim',[-30 30]); olPlotter = outlinePlotter(bep); lblPlotter = laneBoundaryPlotter(bep,'Color','r','LineStyle','-'); lbrPlotter = laneBoundaryPlotter(bep,'Color','g','LineStyle','-'); rbsEdgePlotter = laneBoundaryPlotter(bep); legend('off'); while advance(scenario) rbs = roadBoundaries(car); [position,yaw,length,width,originOffset,color] = targetOutlines(car); lb = laneBoundaries(car,'XDistance',0:5:30,'LocationType','Center', ... 'AllBoundaries',false); plotLaneBoundary(rbsEdgePlotter,rbs) plotLaneBoundary(lblPlotter,{lb(1).Coordinates}) plotLaneBoundary(lbrPlotter,{lb(2).Coordinates}) plotOutline(olPlotter,position,yaw,length,width, ... 'OriginOffset',originOffset,'Color',color) end



Задайте дополнительные разделенные запятой пары Name,Value аргументы. Name имя аргумента и Value соответствующее значение. Name должен появиться в кавычках. Вы можете задать несколько аргументов в виде пар имен и значений в любом порядке, например: Name1, Value1, ..., NameN, ValueN.
'LocationType','center' указывает, что контуры маршрута сосредоточены на маркировках маршрута.'XDistance' — Расстояния перед автомобилем, оборудованным датчиком, в котором можно вычислить контуры маршрутаРасстояния перед автомобилем, оборудованным датчиком, в котором можно вычислить контуры маршрута, заданные как разделенная запятой пара, состоящая из 'XDistance' и N - элемент вектор с действительным знаком. N является количеством значений расстояния.
Пример: 1:0.1:10 вычисляет контуры маршрута каждый 0,1 метра в диапазоне от 1 до 10 метров перед автомобилем, оборудованным датчиком.
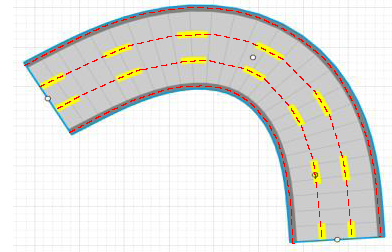
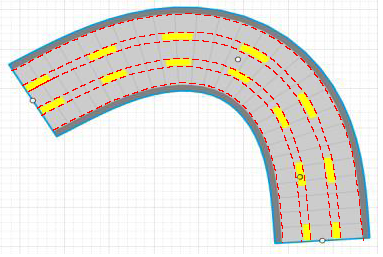
'LocationType' — Местоположение контура маршрута'Center' (значение по умолчанию) | 'Inner'Местоположение контура маршрута на маркировках маршрута, заданных как разделенная запятой пара, состоящая из 'LocationType' и одна из опций в этой таблице.
| Местоположение контура маршрута | Описание | Пример |
|---|---|---|
'Center' | Контуры маршрута сосредоточены на маркировках маршрута. | Трехполосная дорога имеет четыре контура маршрута: один на маркировку маршрута.
|
'Inner' | Контуры маршрута помещаются во внутренние края маркировок маршрута. | Трехполосная дорога имеет шесть контуров маршрута: два на маршрут.
|
'AllBoundaries' — Возвратите все контуры маршрута на дорогеfalse (значение по умолчанию) | trueВозвратите все контуры маршрута, на которых автомобиль, оборудованный датчиком перемещается, заданный как разделенная запятой пара, состоящая из 'Value' и false или true.
Контуры маршрута возвращены слева направо относительно автомобиля, оборудованного датчиком. Когда 'AllBoundaries' false, только контуры маршрута налево и право на автомобиль, оборудованный датчиком возвращены.