Automated Driving Toolbox™ позволяет вам симулировать свои ведущие алгоритмы в 3D среде, которая использует Нереальный Engine® от Epic Games®. В общем случае системы координат, используемые в этой среде, следуют соглашениям, описанным в Системах координат в Automated Driving Toolbox. Однако при симуляции в этой среде, важно знать о конкретных различиях и деталях реализации 3D систем координат симуляции.
Как с другой функциональностью Automated Driving Toolbox, 3D среда симуляции использует предназначенную для правой руки Декартову систему мировой координаты, заданную в ISO 8855. Следующее 2D изображение вида сверху сцены Virtual Mcity показывает X - и Y - координаты сцены.
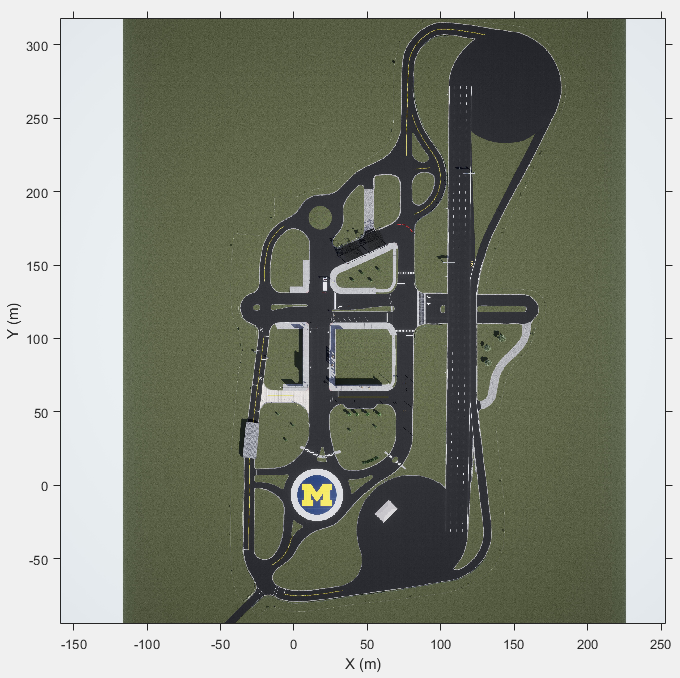
В этой системе координат, при взгляде в положительном направлении X - оси, положительного Y - оставленные точки оси. Положительный Z - ось указывает с нуля. Отклонение от курса, подача и углы вращения по часовой стрелке положительны, при взгляде в положительных направлениях Z - Y - и X - оси, соответственно. Если вы просматриваете сцену из 2D нисходящей перспективы, то угол отклонения от курса против часовой стрелки положителен, потому что вы просматриваете сцену в обратном направлении оси Z.
Транспортные средства помещаются в систему мировой координаты сцен. Рисунок показывает, как, задавая X, Y и порты Yaw в блоках Simulation 3D Vehicle with Ground Following определяют их размещение в сцене.
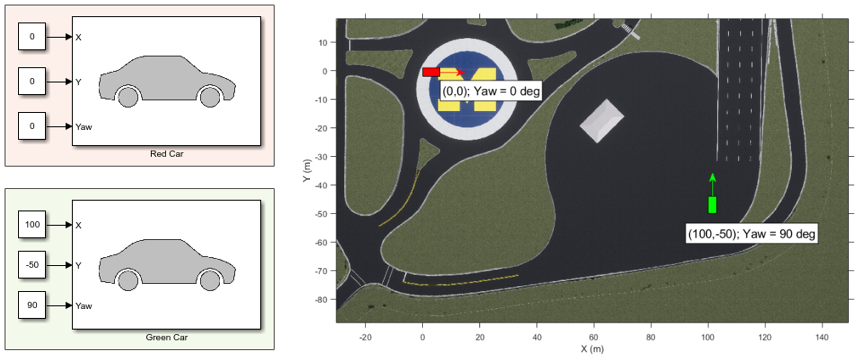
Вертикальное изменение и банковский угол земли определяют Z - ось, угол вращения и угол подачи транспортных средств.
Редактор Unreal® использует предназначенную для левой руки мировую Декартову систему координат, в которой положительный Y - ось указывает право и положительный Z - точки оси вниз. Если вы преобразуете от Нереальной системы координат Редактора до системы координат 3D среды, необходимо инвертировать знак Y - оси, Z - ось, угол подачи и угол отклонения от курса. X - ось и угол вращения являются тем же самым в обеих системах координат.
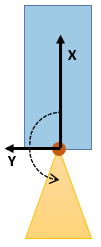
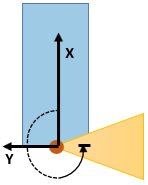
Система координат транспортного средства основана на системе мировой координаты. В этой системе координат:
X - ось указывает вперед от транспортного средства.
Y - ось указывает слева от транспортного средства.
Z - ось подчеркивает от земли.
Прокрутитесь, сделайте подачу, и отклонение от курса по часовой стрелке положительно при взгляде в прямом направлении X-, Y-и осей Z, соответственно. Как с системой мировой координаты, при рассмотрении транспортного средства от верхней части вниз, затем угол отклонения от курса против часовой стрелки положителен.
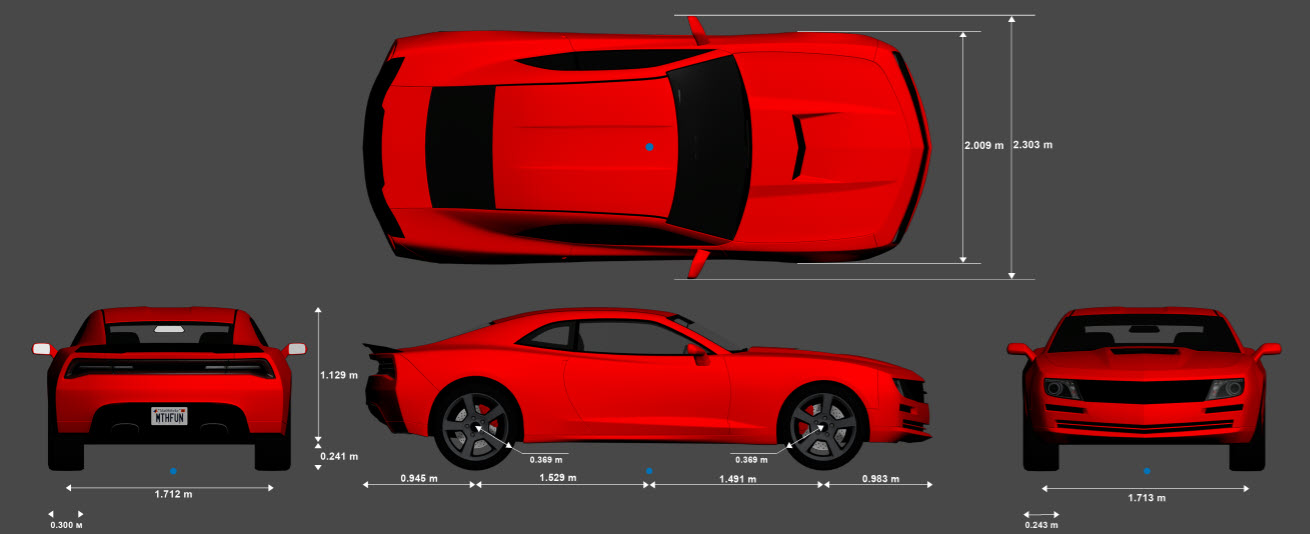
Источник транспортного средства находится на земле в геометрическом центре транспортного средства. В этом рисунке синяя точка представляет источник транспортного средства.
Когда вы добавляете блок датчика, такой как блок Simulation 3D Camera, к вашей модели, можно смонтировать датчик к предопределенному местоположению транспортного средства, такому как передний бампер корневого центра. Эти местоположения монтирования находятся в системе координат транспортного средства. Когда вы задаете смещение от этих местоположений, вы возмещаете от источника монтирующегося местоположения, не от источника транспортного средства.
Эти уравнения задают координаты транспортного средства для датчика с местоположением (X, Y, Z) и ориентация (Roll, Pitch, Yaw):
(X, Y, Z), = (X монтируются + смещение X, Y, монтируются + смещение Y, Z монтируется + смещение Z),
(Roll, Pitch, Yaw), = (Roll монтируются + смещение Roll, Pitch, монтируются + смещение Pitch, Yaw монтируется + смещение Yaw),
Переменные "монтирования" относятся к предопределенным местоположениям монтирования относительно источника транспортного средства. Вы задаете эти местоположения монтирования в параметре Mounting location блока датчика.
Переменные "смещения" относятся на сумму смещения от этих местоположений монтирования. Вы задаете эти смещения в Relative translation [X, Y, Z] (m) и параметрах Relative rotation [Roll, Pitch, Yaw] (deg) блока датчика.
Например, считайте датчик смонтированным к Rear bumper местоположение . Относительно источника транспортного средства датчик имеет ориентацию (0, 0, 180). Другими словами, при рассмотрении транспортного средства от верхней части вниз, угол отклонения от курса датчика вращается против часовой стрелки 180 градусов.
Чтобы указать датчику 90 градусов далее направо, необходимо установить параметр Relative rotation [Roll, Pitch, Yaw] (deg) на [0,0,90]. Другими словами, датчик вращается 270 градусов против часовой стрелки относительно источника транспортного средства, но это вращается только 90 градусов против часовой стрелки относительно источника предопределенного заднего расположения бампера.
В среде симуляции кубоида, как описано в Кубоиде, Управляющем Симуляцией Сценария, источник находится на земле ниже центра задней оси транспортного средства. Если вы преобразуете положения датчика между системами координат, то необходимо объяснить это различие в источнике. Для модели в качестве примера, которая использует такие преобразования, смотрите Следующее за маршрутом Управление с Монокулярным Восприятием Камеры (Model Predictive Control Toolbox).
Нереальный Редактор использует предназначенную для левой руки Декартову систему координат транспортного средства, в которой положительный Y - ось указывает право и положительный Z - точки оси вниз. Если вы преобразуете от Нереальной системы координат Редактора до системы координат 3D среды, необходимо инвертировать знак Y - оси, Z - ось, угол подачи и угол отклонения от курса. X - ось и угол вращения являются тем же самым в обеих системах координат.
Simulation 3D Vehicle with Ground Following
