Automated Driving Toolbox™ служит основой co-симуляции, которую можно использовать, чтобы моделировать ведущие алгоритмы в Simulink® и визуализировать их производительность в 3D среде. Эта 3D среда симуляции использует Нереальный Engine® Epic Games®.
Понимание, как эта среда симуляции работы может помочь вам диагностировать проблемы и настроить ваши модели.
Когда вы используете Automated Driving Toolbox, чтобы запустить ваши алгоритмы, Simulink co-simulates алгоритмы в механизме визуализации.
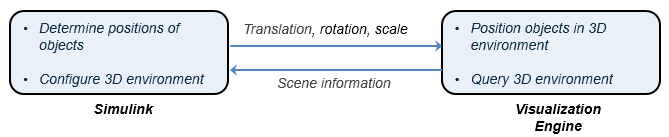
В окружении Simulink, Automated Driving Toolbox:
Конфигурирует 3D среду визуализации, в частности трассировка лучей, получение сцены от камер и начальные положения объекта
Определяет следующее положение объектов при помощи 3D обратной связи среды симуляции
Схема обобщает связь между Simulink и механизмом визуализации.
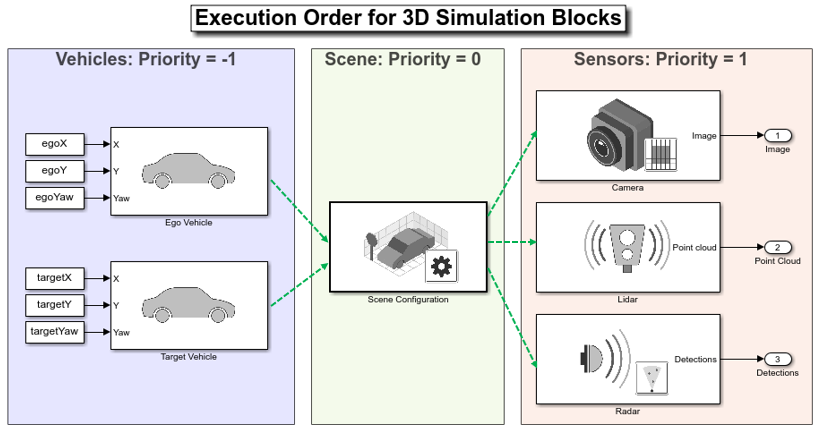
В процессе моделирования 3D блоки симуляции следуют за определенным порядком выполнения:
Блоки Simulation 3D Vehicle with Ground Following инициализируют транспортные средства и отправляют их X, Y и данные сигнала Yaw с блоком Simulation 3D Scene Configuration.
Блок Simulation 3D Scene Configuration получает данные о транспортном средстве и отправляет их в блоки датчика.
Блоки датчика получают данные о транспортном средстве и используют их, чтобы точно определить местоположение и визуализировать транспортные средства.
Свойство Priority блоков управляет этим порядком выполнения. Чтобы получить доступ к этому свойству для любого блока, щелкните правой кнопкой по блоку, выберите Properties и кликните по вкладке General. По умолчанию блоки Simulation 3D Vehicle with Ground Following имеют приоритет -1, блоки Simulation 3D Scene Configuration имеют приоритет 0, и блоки датчика имеют приоритет 1.
Схема показывает этот порядок выполнения.
Если ваши датчики не обнаруживают транспортные средства в сцене, возможно, что 3D блоки симуляции выполняются не в порядке. Попытайтесь обновить порядок выполнения и симулировать снова. Для получения дополнительной информации о порядке выполнения смотрите Управление и Отображение Порядок выполнения (Simulink).
Также убедитесь, что все 3D блоки симуляции расположены в той же подсистеме. Даже если блоки имеют правильные настройки Priority, если они расположены в различных подсистемах, они все еще могут выполниться не в порядке.
Сцены в 3D среде симуляции используют предназначенную для правой руки Декартову систему мировой координаты, заданную в ISO 8855. В этой системе координат, при взгляде в положительном X - направлении оси, положительном Y - оставленные точки оси. Положительный Z - ось подчеркивает от земли.
Датчики смонтированы на транспортных средствах относительно системы координат транспортного средства. В этой системе положительный X - точки оси вперед от транспортного средства, положительного Y - точки оси, оставленные, и положительный Z - ось подчеркивает от земли. Источник транспортного средства находится на земле ниже продольного и бокового центра транспортного средства.
Эти системы координат отличаются от тех используемых в Редакторе Unreal®. Нереальный Редактор использует предназначенные для левой руки системы Декартовой координаты, где Y - ось указывает право и Z - точки оси вниз.
Для получения дополнительной информации о системах координат, используемых в 3D симуляции, смотрите Системы координат для 3D Симуляции в Automated Driving Toolbox.
