Интегрируйте наблюдения вероятности в местоположениях
updateOccupancy( вероятностно интегрирует значения наблюдения, map,xy,obs)obs, к каждой координате, заданной в xy. Значения наблюдения определяются на основе Обратной Модели Датчика.
Создайте 10 m-10 m пустая карта.
map = occupancyMap(10,10,10);
Обновите заполнение мировых местоположений с определенными значениями вероятности и отобразите карту.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; pvalues = [0.2 0.4 0.6 0.8 1]; updateOccupancy(map,[x y],pvalues) figure show(map)

Раздуйте занятые области радиусом 0,5 м. Большие значения заполнения перезаписывают меньшие значения.
inflate(map,0.5) figure show(map)

Получите местоположения сетки от мировых местоположений.
ij = world2grid(map,[x y]);
Установите местоположения сетки на занятые местоположения.
setOccupancy(map,ij,ones(5,1),'grid')
figure
show(map)
Обратная модель датчика определяет, как значения установлены вдоль луча от датчика области значений, читающего в препятствия в карте. NaN значения области значений проигнорированы. Значения области значений, больше, чем maxrange не обновляются.
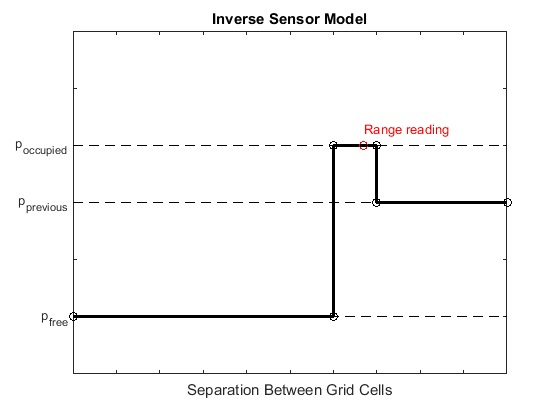
Местоположения сетки, которые содержат показания области значений, обновляются с занятой вероятностью. Местоположения перед чтением обновляются со свободной вероятностью. Все местоположения после чтения не обновляются.
