Как реальные шкивы, блоки-полиспасты Simscape™ Driveline™ используют натяжение ремня и инерцию для движения. Чтобы предотвратить ошибки инициализации и получить желаемую механическую передачу из вашей системы шкивов, примените эти методы моделирования.
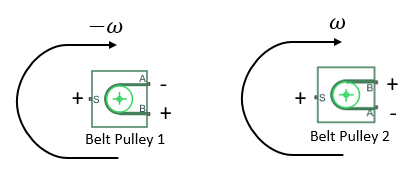
Направление пояса шкива не является геометрическим или физическим ограничением; это - просто соглашение знака. Например, для блока Belt Pulley с набором Belt direction к Ends move in opposite direction, соглашение знака таково, что положительное вращение в порте S имеет тенденцию давать отрицательный перевод для порта A и положительный перевод для порта B. Согласно этому соглашению, скорость вращения является тем же самым для двух шкивов пояса в фигуре.
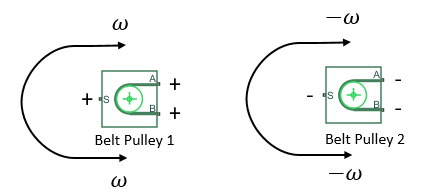
Для блока Belt Pulley с набором Belt direction к Ends move in same direction, соглашение знака таково, что положительное вращение в S имеет тенденцию давать положительный перевод для порта A и положительный перевод для порта B.
Ends move in same direction опция применима к большинству систем шкивов. Ends move in same direction опция позволяет вам моделировать упрощенное представление комплексной талевой системы с концами пояса, которые перемещаются в то же направление.
Чтобы упростить движение, включайте инерцию в систему шкивов. Можно включать инерцию в блок-полиспаст путем определения ненулевого значения для параметра Inertia в параметрах конфигурации блока. Другой способ включать инерцию состоит в том, чтобы добавить нисходящий блок инерции из библиотеки Simscape Driveline Inertias и Loads или из библиотеки Simscape Rotational Elements. Припишите некоторую начальную скорость инерции, по мере необходимости, чтобы инициировать движение в вашей системе шкивов.
Обеспечьте контакт пояса включением механизмов натяжения в вашей системе шкивов. Включайте не менее чем количество пар шкива меньше один. Например, если существует пять пар шкива, включают по крайней мере четыре механизма натяжения. Можно создать механизмы натяжения, использующие пружину и демпферы.
Системный пример Окна со стеклоподъемником Simscape Driveline содержит сеть шкива, которая включает механизмы натяжения и инерцию и применяет рекомендуемые методы направления пояса.
Чтобы открыть модель, в подсказке MATLAB®command, входят
sdl_power_window
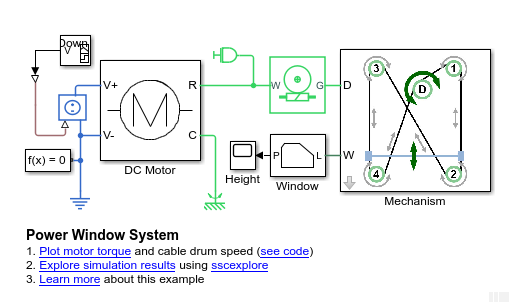
Модель содержит подсистему Mechanism, подсистема маскированная, которая содержит сеть шкива. Подсистема двигателя постоянного тока и кладка блоков Worm Gear вместе, чтобы инициировать движение в системе шкивов. Система также содержит блок Inertia.
Чтобы посмотреть в маске подсистемы Mechanism, кликните по стрелке в нижнем левом углу блока.
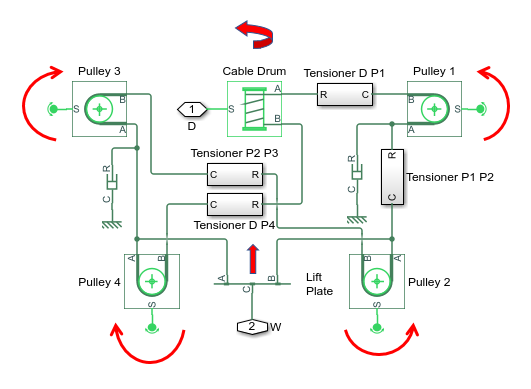
Стрелки показывают, как четыре блока Belt Pulley вращаются в ответ на вращение блока Cable Drum. Если барабан вращается в противоположном направлении, реверсе направлений шкива, и Lift Plate понижен. Существует шесть пар шкива:
Cable Drum и Pulley 1
Pulley 1 и Pulley 2
Pulley 2 и Pulley 3
Pulley 3 и Pulley 4
Pulley 4 и Cable Drum
Pulley 2 и Pulley 4
Поэтому рекомендуется, чтобы система включала по крайней мере пять механизмов натяжения. Lift Plate действует как механизм натяжения для Pulley 2 и пары шкива Pulley 4. Система содержит четыре дополнительных механизма натяжения. Откройте одну из подсистем механизма натяжения.
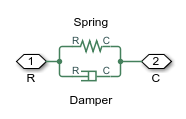
Каждый механизм натяжения содержит пружину и сеть демпфера, которая параметризована с пружиной и коэффициентами затухания кабеля.
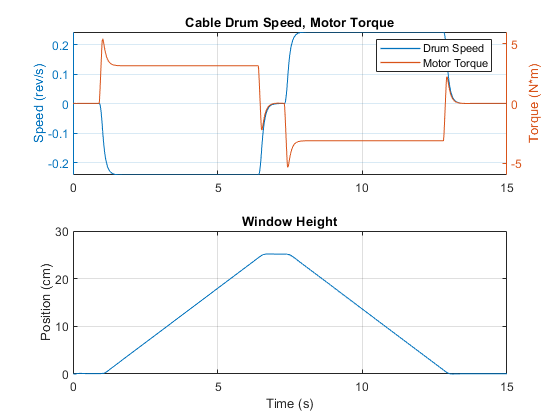
Запустите симуляцию и постройте результаты путем щелчка по ссылке Plot motor torque в холсте модели. Когда Cable Drum имеет отрицательную скорость, Lift Plate имеет тенденцию повышаться, как делает окно. Когда Cable Drum имеет положительную скорость, и Lift Plate и окно имеют тенденцию понижаться.
Откройте Проводник Результатов путем щелчка по ссылке Explore simulation results в холсте модели. На панели инструментов Results Explorer нажмите кнопку настроек![]() и, для параметра Plot signals, выберите
и, для параметра Plot signals, выберите Separate. Используйте Ctrl +click, чтобы открыть графики для:
Mechanism> Cable Drum> A> v
Pulley 1> A> v
Pulley 1> B> v
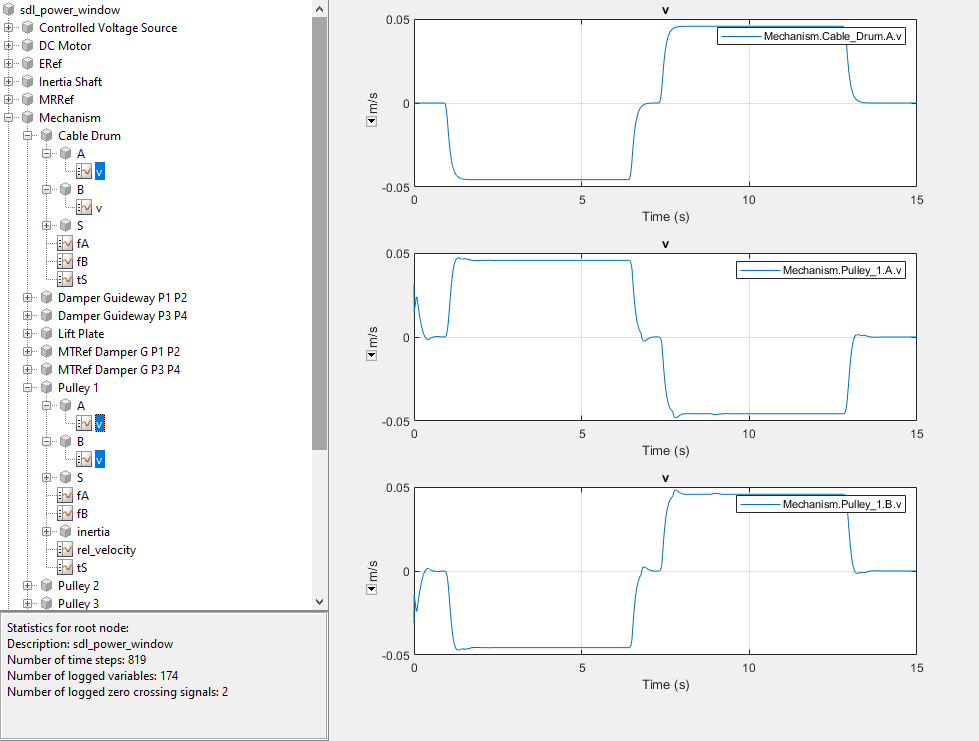
Как ожидалось скорость конца пояса барабана в порте B совпадает со скоростью конца пояса Pulley 1 в порте B и является противоположностью скорости конца пояса Pulley 1 в порте A.
Belt Drive | Belt Pulley | Inertia | Mechanical Translational Reference | Rope Drum | Rotational Free End | Shock Absorber | Translational Damper | Translational Spring | Variable Inertia | Worm Gear
