Зависящая от времени масса и параметры инерции
Первое поколение/Sensors & Actuators
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Variable Mass & Inertia Actuator позволяет вам варьироваться массовый m и/или тензор инерции I Тела, с которым это соединяется. Общая форма второго закона Ньютона для линейного или углового движения
(масса или инерция) * ускорение = внешняя сила или крутящий момент
Этот блок внешне варьируется крайний левый параметр по этому закону движения с сигналом Simulink®.
Variable Mass & Inertia Actuator не прикладывает сил тяги или закручивает сопоставленный с массовой потерей или усилением Тела. Такие эффекты тяги произошли бы на левой стороне силы или закона о крутящем моменте как условия, пропорциональные производным времени массы или тензора инерции, dm/dt или d I /dt, умноженный на связанные скорости тяги. Необходимо отдельно прикладывать такие силы тяги или крутящие моменты к Телу с Приводами Тела.
Вы соединяете блок Variable Mass & Inertia Actuator с исходным Телом в системе координат (CS) Тела. Можно соединить несколько Variable Mass & Inertia Actuators с одним Телом, каждым Приводом в отдельном порте Body CS. Если порты Body CS испытывают недостаток, открывают диалоговое окно Тела и создают их по мере необходимости.
В каждом CS Тела, так соединенном, Variable Mass & Inertia Actuator создает невидимое тело. Прикрепление эквивалентно соединению другого Тела со Сваркой, за исключением того, что массовые свойства другого тела меняются в зависимости от времени. Это невидимое тело имеет изменяющийся во времени массовый и/или симметричный тензор инерции, предоставленный внешним Сигналом Simulink. Система координат центра тяжести (CS CG) невидимого тела идентична присоединенному CS Тела. Тензор инерции невидимого тела оценен в этом CS в осях этой системы координат.
После того, как запущенный, симуляция Simscape Multibody создает объединенное или составное тело, сделанное из невидимого, изменяющегося во времени тела, созданного Приводом и исходным Телом. Общая масса составного тела является суммой видимого Тела и масс невидимого тела. CG этого составного тела повторно вычисляется на каждом временном шаге. Тензор инерции составного тела формируется на каждом временном шаге путем объединения тензоров инерции видимого Тела и невидимого тела. Объединенный тензор инерции затем оценен в новом CG составного тела.
Изменяющаяся во времени масса и тензор инерции невидимого тела должны удовлетворить этим требованиям:
Массовые и основные инерционные моменты могут быть положительными, отрицательными, или нуль.
Единственное ограничение то, что общая масса и основные инерционные моменты составного тела быть неотрицательным.
Изменяющийся во времени тензор инерции невидимого тела должен быть симметричным.
Можно смешать переменное массовое и/или переменное приведение в действие тензора инерции.
| Приведение в действие | Эффект на связанном теле |
|---|---|
| Одна только переменная масса | Добавляет изменяющаяся во времени масса точки в присоединенном CS Тела |
| Один только переменный тензор инерции | Добавляет изменяющийся во времени тензор инерции в присоединенном CS Тела, не изменяя общую массу составного тела |
| Переменная масса и тензор инерции объединены | Добавляет невидимое тело с изменяющейся во времени массой и тензором инерции в присоединенном CS Тела |
В то время как невидимое, присоединенное тело и невидимое составное тело имеют изменяющиеся во времени массовые свойства, вы не видите видимых изменений в исходном Теле, которое вы приводите в движение. Массовые свойства в его диалоговом окне не изменяются.
Если вы визуализируете приводимое в движение Тело varying-mass/inertia как эквивалентный эллипсоид, эллипсоид отображен с помощью статических данных в самом диалоговом окне Тела. Отображенный эллипсоид игнорирует эффект любой Variable Mass & Inertia Actuators, присоединенной к Телу. Займитесь Телесным цветом и Геометрией.
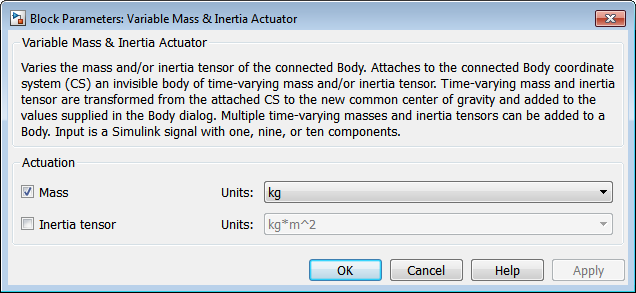
Диалоговое окно имеет одну активную область, Actuation.
Можно применить переменную массу, переменный тензор инерции или обоих, к телу.
Если вы применяете обоих, необходимо связать переменную массу и тензор инерции в сигнал с 10 компонентами в порядке, показанном в диалоговом окне.
Установите флажок, чтобы применить внешнюю изменяющуюся во времени массу от входного Сигнала Simulink. В выпадающем меню направо, выберите модули для этой изменяющейся во времени массы. Значением по умолчанию является kg (килограммы).
Установите флажок, чтобы применить внешний изменяющийся во времени тензор инерции от входного Сигнала Simulink. В выпадающем меню направо, выберите модули для этого изменяющегося во времени тензора инерции. Значением по умолчанию является kg-m2 (килограмм-meters2).
Входной сигнал Simulink имеет следующие компоненты. Для переменной массы или одного только приведения в действие тензора инерции, не используйте недостающие компоненты.
| Изменяющаяся во времени масса (скаляр) | Изменяющийся во времени тензор инерции (с 9 векторами): (I 11 , I21 , I31 , I12 , ... ) |
[1] Корбин, H. C., и П. Стехл, Классическая Механика, Секонд-Эдайшн, Нью-Йорк, Дуврские Публикации, 1994 (первое издание, 1960), главы 2, 5, и 9.
[2] Голдстайн, H., Классическая Механика, Второй Выпуск, Чтение, Массачусетс, Аддисон-Уэсли, 1980, главы 4 и 5.
[3] Piscane, V. L., и Р. К. Мур, редакторы, Основные принципы Систем Пробела, Университетская Физика Джонса Хопкинса Лабораторный Ряд / Апплид-Физикс-Лэборэтори-Серис, Нью-Йорк, издательство Оксфордского университета, 1994, главы 3, 4, и 5.
Смотрите Варьирование Массы и Инерции Тела Tensor для больше при варьировании массы и тензора инерции тела.
