Зависящая от времени сила и крутящий момент раньше приводили в движение тело
Первое поколение/Sensors & Actuators
Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Body Actuator приводит в движение блок Body с обобщенным сигналом силы, представление силы/крутящего момента применилось к телу:
Обеспечьте для поступательного движения
Закрутите для вращательного движения
Обобщенная сила является функцией времени, заданного входным сигналом Simulink®. Этим сигналом может быть любой Сигнал Simulink, включая обратную связь сигнала от блока Sensor.
Привод Тела применяет сигнал приведения в действие в системе координат привязки (CS), заданный в диалоговом окне блока.
Импорт является входным сигналом Simulink. Выход является портом коннектора, который вы соединяете с блоком Body, который вы хотите привести в движение.
Тщательно отличите Привод Тела от Блоков драйверов:
Блок Body Actuator прикладывает обобщенные силы к одному телу в заданном ссылочном CS.
Блоки драйверов управляют относительными степенями свободы между парами тел.
Блок Body Actuator приводит в движение Тело с сигналами силы/крутящего момента только. Чтобы привести в движение Тело с сигналами движения или начальными условиями, или управлять относительными степенями свободы между парой Тел, смотрите Приведение в действие Объединенного и Объединенного Примера Привода: Драйвер Тела.
mech_body_driver модель показывает, как управлять относительным числом степеней свободы между парой тел. Чтобы привести в движение одно единственное тело, используйте эту модель и замените второй блок Body на блок Ground. Чтобы установить начальные условия тела, замените второй блок Body на блок Ground и Объединенные Приводы с Объединенными Начальными Приводами Условия.
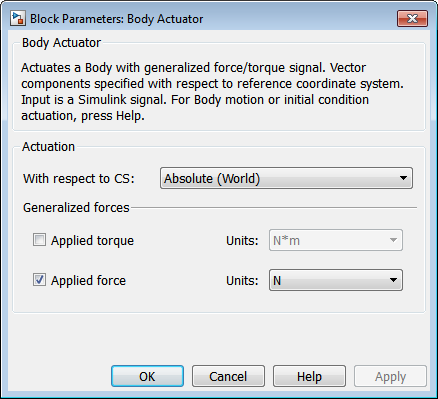
Диалоговое окно имеет одну активную область, Actuation.
В выпадающем меню выберите систему координат (CS), в которой интерпретирована сила/крутящий момент приведения в действие: любой Local (Body CS) с которым Привод соединяется или Absolute (World) по умолчанию.
Можно прикладывать силу, крутящий момент или обе обобщенных силы к телу.
Если вы применяете обоих, необходимо связать крутящий момент и векторы силы в сигнал с 6 компонентами в порядке, показанном в диалоговом окне.
Установите флажок, если часть или весь сигнал приведения в действие являются вращательным крутящим моментом. Значение по умолчанию не выбрано. Вход крутящего момента Simulink является связанным сигналом с 3 компонентами.
В выпадающем меню Units выберите модули для крутящего момента приведения в действие. Размерность по умолчанию является N/m (ньютон-метры).
Установите флажок, если часть или весь сигнал приведения в действие являются поступательной силой. Значение по умолчанию выбрано. Вход силы Simulink является связанным сигналом с 3 компонентами.
В выпадающем меню Units выберите модули для силы приведения в действие. Значением по умолчанию является N (ньютоны).
Вот Привод Тела, соединенный с Телом:
Необходимо соединить Привод Тела с Телом в одном из который присоединенный CSS Тела Тела в соответствующем Порте CS Тела. Сигнал приведения в действие действует на Тело в том начале координат CS Тела.
Body, Body Sensor, Driver Actuator, Joint Actuator, Joint Initial Condition Actuator, Mechanical Branching Bar
Дополнительную информацию см. в Представлениях Движения Тела на вращениях системы координат Тела.
Смотрите приведение в действие объединенного и объединенного примера привода: драйвер тела.
