Твердое тело с системами координат, инерцией и геометрией
Первое поколение / тела

Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Блок Body представляет твердое тело со свойствами, которые вы настраиваете. Представление, которое вы задаете, должно включать:
Масса тела и момент тензора инерции
Координаты для центра тяжести тела (CG)
Одна или несколько систем координат Тела (CSS)
Представление может также включать дополнительную геометрию тела и информацию о цвете для визуализации.
Твердое тело задано на пробеле положением его CG (или центр массы) и его ориентация в некоторой заданной системе координат.
Исходное положение и ориентация тела установлены записями в его диалоговом окне Тела, которые задают домашнюю настройку тела. Эти начальные условия остаются неизменными, если с Joint Initial Condition Actuator вы не изменяете начальные условия Соединения (соединений), соединенного с Телом до запуска симуляции, или вы приводите в движение Тело с Body Actuator. Наложение дополнительных начальных условий задает начальную настройку тела.
Необходимо ввести свойства для тела Simscape Multibody в двух наборах, массовые свойства и свойства системы координат. Третий набор, свойства визуализации, является дополнительным.
Массовые свойства заданы массой тела и тензором инерции.
Масса является инерцией тела и управляет поступательным ускорением CG в ответ на приложенную силу.
Тензор инерции измеряет распределение массовой плотности в теле и управляет вращательным ускорением тела о CG в ответ на прикладной крутящий момент.
Компоненты тензора инерции управляют начальной ориентацией тела и всегда интерпретируются как являющийся в осях CS CG. Ориентация осей CS CG относительно другого CS, внешнего к телу (Мировой CS, CS на Земле или CS на другом Теле) затем, определяет ориентацию тела относительно других тел или относительно Мира.
Тензор инерции тела задает свои основные оси и моменты и свой эквивалентный эллипсоид, одну из стандартных форм, доступных для отображения тела на пробеле.
Свойства системы координат заданы CSS Тела тела.
CS с его источником в CG требуется. Точка CG задает и исходное положение целого тела и источник CS CG. Необходимо также ориентировать оси CS CG.
Можно разместить один или несколько дополнительный CSS Тела в тело. Диалоговое окно Тела требует по крайней мере одного. Необходимо задать каждый CS Тела положением его источника и ориентацией его осей CS.
Каждая связь Соединения, Ограничение/Диск, Привод или блок Sensor к Телу требуют точки привязки на Теле. Эта точка привязки является одним из источников CS Тела.
CSS тела на блоке, доступном для связей, показывают порты Body CS![]() на сторонах блока. Можно показать или скрыть каждый CS Тела на сторонах блока.
на сторонах блока. Можно показать или скрыть каждый CS Тела на сторонах блока.
Набор источников CS Тела тела (включая CS CG) задает выпуклую оболочку тела, одну из стандартных форм, доступных для отображения тела на пробеле.
Свойства визуализации тела включают его цвет и геометрию (поверхностный размер и форма).
Как значение по умолчанию, машиной которого Тело является участником, определяет эти свойства визуализации.
Можно частично или полностью заменить эти значения по умолчанию с пользовательскими настройками для отдельного Тела.
Эти два свойства определяют исходное положение и ориентацию тела:
Положение CG тела устанавливает свое исходное положение.
Компоненты тензора инерции тела (в CS CG) и ориентация осей CS CG относительно другого CSS в машине устанавливают ее начальную ориентацию.
Начальные условия машины могут быть изменены с блоками Joint Initial Condition Actuator, прежде чем вы запустите симуляцию. Если вы не изменяете начальное состояние Тела, прежде чем симуляция, симуляция Simscape Multibody установит свое исходное положение и ориентацию к ее диалоговым записям Тела, задавая домашнюю настройку тела. Симуляция Simscape Multibody также устанавливает линейную начальную букву Тела / скорости вращения обнулять в этом случае.
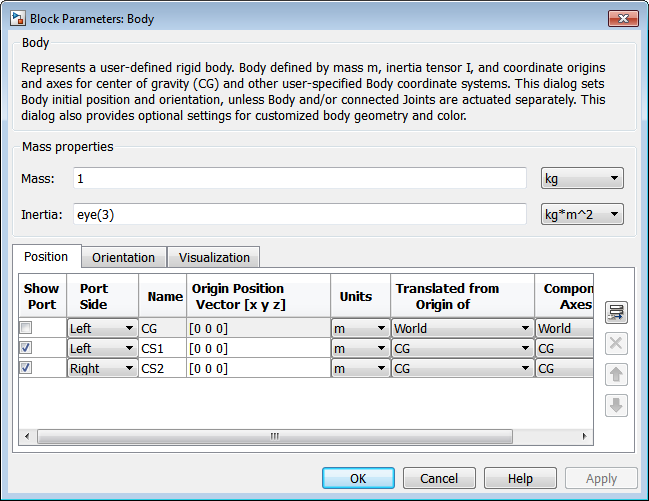
Диалоговое окно имеет две активных области, Mass properties и набор вкладок, Position и Orientation для систем координат Тела, а также Visualization.
Введите массу тела в первом поле и выберите модули в выпадающем меню направо. Масса должна быть положительным, вещественным числом или MATLAB® эквивалентное выражение. Значениями по умолчанию является 1 и kg (килограммы).
Введите тензор инерции (относительно осей CS CG Тела) в первом поле и выберите модули в выпадающем меню направо. Тензор должен быть 3х3 действительной, симметрической матрицей. Тензором по умолчанию является eye(3), MATLAB 3х3 единичная матрица. Нулевой тензор zeros(3,3) задает массу точки. Модульным значением по умолчанию является kg-m2 (килограммы-meters2).
Вы настраиваете CSS Тела на вкладках Orientation и Position:
Настройка по умолчанию состоит из трех CSS Тела: необходимый CS CG присоединяется к CG тела и двум другим дополнительным CSS Тела, названным “CS1” и “CS2”, для соединения Соединений, Ограничений или Драйверов.
Можно сконфигурировать CS CG, но не удалить его. Вы также не можете создать дополнительный CSS CG, несмотря на то, что можно скопировать CS CG с другим именем. (См. больше о следующем средств управления системами координат Тела.)
Другой CSS может быть сконфигурирован или удален, как вы хотите, сохраняя по крайней мере один.
Конфигурирование CSS Тела требует двух групп шагов:
Расположение источника CS Тела во вкладке Position
Ориентация осей CS Тела во вкладке Orientation
Определение CSS Тела требует обращения к другому, существующему ранее CSS в модели. В данном блоке Body можно обратиться к Телу и Основанному CSS тремя способами. Ссылки должны быть к:
Мир
Другой CSS Тела на том же теле
Смежный CS, система координат на соседнем теле или земле, непосредственно соединенной с выбранным CS Тела Соединением, Ограничением или Драйвером
Необходимо прямо или косвенно задать весь CSS Тела в отношении Земли или к Миру. С косвенной ссылкой вы задаете CS Тела относительно другого CS и так далее в цепи ссылок, которая в конечном счете заканчивается в Земле или Мире. Цепи ссылки CS Position и вкладок Orientation могут отличаться. Цепи ссылки CS не должны формировать замкнутый цикл.
Переключитесь между вкладками Orientation и Position.
Каждый CS Тела помечен именем, CG для CS CG и CS1, CS2, и т.д., для дополнительного CSS.
Поля Position для каждого CS Тела задают положение источника того CS как вектор сдвига:
Числовые компоненты векторных модулей переноса.
Компоненты вектора сдвига ориентированы относительно другого набора осей CS.
Источник перемещен от источника другого, существующего ранее CS в вашей машине этим вектором сдвига.
Подсветите каждый CS Тела, чтобы сконфигурировать его.
Введите вектор сдвига, который задает положение источника CS Тела.
Запись для источника CS CG располагает целое тело.
Выберите линейные модули для вектора сдвига. Значением по умолчанию является m (метры).
В выпадающем меню выберите другой, существующий ранее CS в вашей машине, которая задает начальную точку для вектора сдвига. Выбором является World, Adjoining, и другой CSS Тела на этом Теле. Конечная точка вектора сдвига является этим источником CS Тела.
Для CS CG CS отправной точки по умолчанию является World. Для дополнительного CSS Тела (CS1, CS2, и т.д.), CS начальной точки по умолчанию является CG этого Тела.
В выпадающем меню выберите CS, оси которого задают ориентацию компонентов вектора сдвига. Выбором является World, Adjoining, и другой CSS Тела на этом Теле. Компоненты вектора сдвига измеряются относительно осей CS, выбранного в этом столбце.
Для CS CG CS ориентации по умолчанию является World. Для дополнительного CSS Тела (CS1, CS2, и т.д.), CS ориентации по умолчанию является CG этого Тела.
Поля Orientation для каждого CS Тела задают ориентацию триады того CS осей как вращение:
Вектор ориентации определение вектора вращения имеет три компонента.
Числовые компоненты векторных модулей переноса.
Вращение ориентировано относительно некоторого другого, существующего ранее набора осей координат CS в вашей машине.
Компоненты вектора ориентации интерпретированы в соглашении представления вращения.
Подсветите каждый CS Тела, чтобы сконфигурировать его.
Введите компоненты вращения, которое задает ориентацию осей CS Тела. Геометрическое значение этих компонентов определяется столбцом Specified Using Convention.
Необходимая запись для CS CG ориентирует оси CS CG. Вместе с записью Inertia tensor в Mass properties оси CS CG ориентируют целое тело относительно другого CS в вашей машине.
Выберите угловые единицы для вращения, степеней или радианов. Значением по умолчанию является deg (степени).
В выпадающем меню выберите один из другого существующего ранее CSS в вашей машине, чтобы задать стартовую ориентацию для вращения. Выбором является World, Adjoining, и другой CSS Тела на этом Теле.
В выпадающем меню выберите тип представления для вращения:
| Тип вращения | Компоненты вектора ориентации |
|---|---|
Quaternion | [n x*sin (θ/2) n y*sin (θ/2) n z*sin (θ/2), потому что (/2)] |
3x3Transform | 3х3 ортогональная матрица вращения R |
Euler | Углы поворота приблизительно последовательность трех осей, задающих соглашение Угла Эйлера [first-axis second-axis third-axis] |
Существует три соглашения в блоке Body для представления вращений. Смотрите Представления Движения Тела и Представления Ориентации Тела, чтобы узнать больше о вращениях.
Euler
Соглашение Угла Эйлера задает вращение осей CS Тела путем вращения приблизительно трех осей в последовательности. Компоненты 1 3 вектора-строки являются углами вращения вокруг тех трех осей, соответственно в последовательности, в градусах или радианах.
Например, Euler X-Y-Z средние значения вращаются об исходной оси X, затем о первой промежуточной оси Y, и затем о второй промежуточной оси Z. Другой пример: Euler X-Z-Y средние значения вращаются об исходной оси X, затем о первой промежуточной оси Z, и затем о второй промежуточной оси Y.
3-by-3 Transform
Соглашение преобразования задает вращение как безразмерную 3х3 ортогональную матрицу вращения. Инверсия ортогонального матричного R равна транспонировала: R-1 = R T.
Столбцы R являются единичными векторами (x,y,z) осей CS Тела. Модульное меню неактивно.
Quaternion
Соглашение кватерниона задает вращение в форме угловой оси как безразмерный вектор-строка 1 на 4:
[n x*sin (θ/2) n y*sin (θ/2) n z*sin (θ/2), потому что (/2)]
n = (n x, n y, n z) является трехкомпонентным вектором единичной длины: n·n = n x2 + n y2 + n z2 = 1.
Единичный вектор n задает ось вращения. Угол поворота приблизительно та ось является θ и следует за правилом правой руки.
Средства управления системой координат Тела (см. следующую фигуру, Средства управления Системами координат Тела) позволяют вам добавлять, переупорядочивать, и удалять CSS Тела на блоке Body.
Добавить CS Тела в список:
Подсветите существующий CS Тела в списке.
Нажмите кнопку Add (см. следующую фигуру, Средства управления Системами координат Тела).
Новый CS Тела сразу появляется ниже CS Тела, который вы подсветили. Новый CSS Тела называют в последовательности в честь текущих единиц: CS3, CS4, и т.д.
Сменить положение CS Тела в списке:
Подсветите CS Тела, положение которого вы хотите сменить.
Нажмите на кнопку Up или Down (см. следующую фигуру, Средства управления Системами координат Тела), пока CS Тела не то, где вы хотите его.
Удалить CS Тела из списка:
Подсветите CS Тела, который вы хотите удалить.
Вы не можете удалить CS CG Тела или последний CSS неCG.
Нажмите на кнопку Delete (см. следующую фигуру, Средства управления Системами координат Тела).
CS Тела, который вы подсветили, исчезает.
Средства управления системами координат тела
Соединение Соединения, Ограничения, Драйвера, Привода или блока Sensor с блоком Body требует существующего и сконфигурированного CS Тела на том Теле:
Эти другие блоки задают, ограничивают, передают и измеряют движение тел относительно источника и осей координат CSS Тела. Соедините каждый из этих блоков к CS Тела с линией связи.
Фактическая линия связи, запускающаяся от другого блока до блока Body, должна быть привязана на отображенном Порте CS Тела![]() на стороне блока Body в окне модели.
на стороне блока Body в окне модели.
Отображенный Порт CS Тела на блоке Body указывает на CS Тела с отображенным именем, сконфигурированным внутренне в блоке Body.
Не весь CSS Тела, сконфигурированный в блоке Body, должен быть отображен, как бы то ни было.
Смотрите предыдущую фигуру, Средства управления Системами координат Тела.
Установите этот флажок для любого CS Тела, чтобы создать соответствующий Порт CS Тела![]() на стороне блока Body. CS Тела на той линии в списке CS Тела теперь доступен для связи с другими блоками.
на стороне блока Body. CS Тела на той линии в списке CS Тела теперь доступен для связи с другими блоками.
Снимите этот флажок, чтобы удалить Порт CS Тела, соответствующий тому CS Тела на той линии в списке.
Значения по умолчанию не выбраны для CG, выбранный для CS1 и CS2.
Чтобы применить ваш выбор к отображенному блоку Body, нажмите Apply.
Из выпадающего меню выберите, какая сторона блока Body вы хотите, чтобы Порт CS Тела для того CS Тела был помещен в, Left или Right.
Значениями по умолчанию является Left для CG и CS1 и Right для CS2.
Чтобы применить ваш выбор к отображенному блоку Body, нажмите Apply.
Настройки визуализации для тела состоят из
Геометрия тела (появляются форма),
Цвет
Окно визуализации использует эти настройки, чтобы отобразить тело. По умолчанию тело наследовало настройки визуализации машины, с которой оно соединяется.
Можно изменить значения по умолчанию визуализации индивидуально с этими меню.
Из выпадающего меню выберите форму поверхности тела:
Use machine default body geometry (значение по умолчанию)
Convex hull from Body CS locations для выпуклых оболочек
Equivalent ellipsoid from mass properties для эквивалентных эллипсоидов
External graphics file (см. определение и конфигурирование внешнего графического файла),
Из выпадающего меню выберите телесный цвет:
Use machine default (значение по умолчанию)
Use color palette (см. определение цвета от цветовой палитры),
Если вы выбираете External graphics file в выпадающем меню Body geometry необходимо указать некоторую дополнительную информацию.
В поле задайте графический файл.
Можно искать файлы в файловой системе путем нажатия кнопки ... обзора.
В выпадающем меню задайте который CS Тела присоединить графику к. Ваш список CS Тела задан вкладкой Position.
Этот CS Тела служит ссылочным источником и осями координат для геометрии тела. Геометрические измерения в графическом файле интерпретированы в модулях, сопоставленных с этим CS Тела.
Пользовательская визуализация тела требует графического файла геометрии тела в стереолитографическом (STL) формат. Это поддерживает и двоичный файл и типы ASCII формата STL.
Для пользовательской визуализации, чтобы работать, этот файл STL должен быть также:
На вашем пути MATLAB.
В вашем MATLAB представляют рабочую папку.
Заданный с полным путем в диалоговом окне Тела.
В противном случае визуализация возвращается к геометрии тела по умолчанию.
Если вы выбираете Use color palette в выпадающем меню Body color кнопка цветовой палитры появляется справа от меню. Нажмите кнопку цветовой палитры, чтобы выбрать цвет для тела.
Body Actuator, Body Sensor, Ground, Machine Environment, Mechanical Branching Bar
Смотрите соответствующие записи в Глоссарии: примыкая к CS, вращению угла оси, телу, CS Тела, центр тяжести (CG), выпуклая оболочка, система координат (CS), эквивалентный эллипсоид, Углы Эйлера, тензор инерции, масса, основные оси, основные инерционные моменты, кватернион, правило правой руки и матрица вращения.
Смотрите Территорию Моделирования и Тела и Создание Портов CS Тела для больше при подготовке Тел в машинах.
Смотрите Применение Движений и Сил для того, чтобы установить общие начальные условия (положения и скорости) числа степеней свободы в машине.
