Это содержимое характерно для программного обеспечения Simscape™ Multibody™ First Generation. Функции первого поколения намечают, чтобы быть удержанными от использования и нужно избежать.
Внутренние силы являются силами, к которым машина применяется сама в результате ее собственного движения. В отличие от сил приводов, вы не прикладываете эти силы снаружи машины с сигналами Simulink®. Движения тела вместо этого генерируют силы и крутящие моменты непосредственно.
Библиотека Force Elements обеспечивает готовые блоки, чтобы представлять определенные виды внутренних сил и крутящих моментов, действующих между телами. Можно также создать собственную индивидуально настраиваемую обратную связь привода датчика к пружинам модели, демпферы и другие объединяют внутренние силы.
Обобщенная линейная сила между двумя телами является линейной функцией относительного вектора смещения этих двух тел r и относительной скорости v с постоянными коэффициентами. Блок Body Spring & Damper моделирует силу, действующую между двумя телами вдоль оси r, соединяющий их:
F =-k (r - r 0) - bv ||
Блок соединяется с обеих сторон с Телами в системе координат (CS) Тела. Смещение r является вектором от одного CS Тела на одном Теле к другому CS Тела на другом Теле. Третий закон ньютона требует, что силы, которые тела порождают друг на друга быть равными и противоположными.
Общая физическая система, которую представляет эта модель силы, является комбинацией пружинного демпфера, где демпфер является dashpot действие только вдоль пружинной оси. Затухание является только функцией v компонента || вектора скорости, спроектированного вдоль смещения r. (Таким образом затухание в этом блоке не может представлять затухание из-за вязкого носителя, потому что нет никакого перпендикуляра силы затухания к пружинной оси. Смотрите Вставку Линейной Силы или Крутящего момента Через Соединение.)
Вы вводите постоянные параметры r 0, k и b в диалоговом окне Body Spring & Damper. r 0 является естественной продолжительностью пружины, длина, которую это имеет, когда никакие силы не действуют на него. Коэффициент упругости k и затухание постоянного b должен быть неотрицательным.
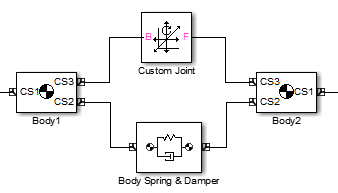
Чтобы завершить линейную модель силы между телами, необходимо смоделировать поступательные степени свободы (число степеней свободы) между ними, когда сам блок Force Element не представляет это число степеней свободы. Можно использовать любой Блок соединений, содержащий по крайней мере один призматический примитив, чтобы представлять поступательное движение. Эти два Тела, Соединение и Body Spring & Damper должны сформировать замкнутый цикл.
Следующая блок-схема представляет два Тела с ослабленной пружиной между ними. Пользовательское Соединение представляет относительное поступательное число степеней свободы тел с тремя призматическими примитивами. В этом случае CS2 и CS3 на Body1 являются тем же самым, и CS2 и CS3 на Body2 являются тем же самым. Таким образом Соединение соединяется с тем же CSS Тела, которые задают концы оси пружинного демпфера.
Другой способ вставить линейный элемент силы между двумя телами состоит в том, чтобы соединить его с соединением, которое уже соединяет тела. Необходимо применить элемент силы, как привод, к каждому примитиву в соединении индивидуально. Этот подход имеет несколько преимуществ перед Body Spring & Damper:
Можно создать различный закон о силе, с различной пружинной длиной, коэффициентом упругости и затуханием постоянного, для каждого из примитивов соединения.
Пружина и силы демпфера, действующие на каждое примитивное действие независимо в их соответствующих направлениях, вместо в зависимости от только расстояния межтела с одной пружинной длиной, коэффициентом упругости, и ослабляющие постоянный.
Это позволяет вам создавать упругие и демпфирующие силы, которые действуют независимо в два или три измерения, в отличие от силы Body Spring & Damper, которая действует только вдоль одной оси. Затухание сил, действующих на несколько примитивов, действует как 2D и 3D вязкий носитель, не как dashpot.
Соединение, представляющее число степеней свободы между телами, уже присутствует.
Вы используете блок Joint Spring & Damper, чтобы реализовать такие силы/крутящие моменты пружинного демпфера вместе с Соединением. С ним можно применить линейную пружину и силу демпфера к каждому призматическому примитиву и линейной скрученности и крутящему моменту демпфера к каждому вращательному примитиву в Блоке соединений. (Вы не можете применить эти крутящие моменты к сферическому примитиву.)
Выберите Соединение, уже соединенное между двумя Телами. Вы соединяете Joint Spring & Damper block с Блоком соединений в порте датчика/привода на Соединении. (Раздел Actuating a Joint объясняет, как создать такой порт.) Диалоговое окно The Joint Spring & Damper затем перечисляет каждый примитив в Соединении.
Для каждого призматического примитива вы хотите привести в движение с силой пружинного демпфера, вы задаете длину родника (смещение), коэффициент упругости и затухание постоянного. Для каждого вращательного примитива вы хотите привести в движение с крутящим моментом демпфера скрученности, вы задаете естественный угол скрученности (смещение или угол, в котором примитивные точки отсутствуют любые крутящие моменты), постоянная скрученность, и затухание постоянного. Вы делаете эти спецификации в диалоговом окне Joint Spring & Damper.
Вот два тела, соединенные Пользовательским Соединением, в свою очередь соединенным с Joint Spring & Damper block.
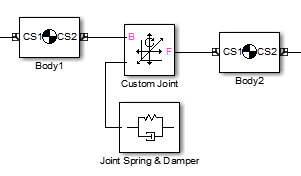
В отличие от примера в предыдущем разделе, Вставка Линейной Силы Между Телами, Пользовательское Соединение может иметь до трех prismatics и три revolutes, каждого с отдельной линейной силой или крутящим моментом, действующим через него. Каждая сила или крутящий момент действуют одинаково и противоположно на каждом теле, в соответствии с третьим законом Ньютона.
Можно создать собственные элементы силы, действующие через Соединения или на Телах при помощи обратной связи Привода Датчика. С этим методом можно не только смоделировать линейные силы, но любую силу, которая зависит от тела или объединенных положений и скоростей.
Этот простой пример иллюстрирует метод с линейным законом об упругой силе. Закон Гука утверждает, что сила, порожденная к расширенной пружине, пропорциональна своему смещению от ее нерасширенного положения: F =-kx.
Следующая модель Simscape Multibody представляет пружину, которая подчиняется закону Гука.
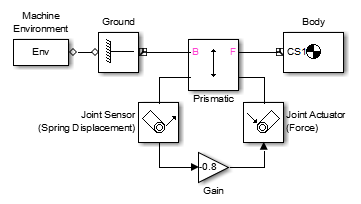
Использование модели, которое блок Gain пометил Spring Constant, чтобы умножить смещение призматического соединения, пометило Spring вдоль y В мире - ось коэффициентом упругости -0.8. Выход блока Gain является силой, порожденной к пружине. Модель питается, сила назад в призматическое соединение через Привод пометила Force. Модель инкапсулирует пружинную блок-схему в подсистеме, чтобы разъяснить модель и позволить пружине быть вставленной в другом месте.
