Создайте кинематические переменные из избранной пары системы координат в KinematicsSolver объект
addFrameVariables( добавляет к ks,groupName,type,base,follower)KinematicsSolver объект ks переменные должны были получить преобразования между парой системы координат. Системы координат могут быть любой парой интереса, одно служение в качестве последователя, другой как основа.
Преобразования могут иметь два типа: переводы и вращения. Переменные являются своими векторными компонентами, связанными, чтобы сформировать новую переменную группу или расширить ту, уже сформированную.
Переменные перевода включают x-y-z Декартова последовательность смещения. Переменные вращения включают x-y-z внутренняя угловая последовательность. Углы - каждый об осях вращающейся системы координат последователя.
Выход является обновленной таблицей с переменными системы координат — и новый и старый — в строках. Каждая строка дает ID переменной, путей к блоку Simulink к базе и последующей системе координат, из которой это выводит, и модуль, в котором выражается его значение.
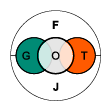
Рисунок показывает переменные общего KinematicsSolver объект. Цель (T), угадайте (G) и выведите переменные (O), может быть объединенные переменные (J) или структурировать переменные (F). Объединенные переменные являются нативными к объекту и могут быть присвоены от его запуска как цели, предположения и выходные параметры. Переменные системы координат должны сначала быть созданы с addFrameVariables.
addFrameVariables( добавляют переменные системы координат к ks,groupName,type,base,follower,Name,Value)KinematicsSolver объект ks и изменяет их модули в эквивалентную меру, заданную в Аргументах пары "имя-значение".
KinematicsSolver | clearFrameVariables | frameVariables | jointVariables | removeFrameVariables
