В этом примере показано, как смоделировать двойной маятник — простая кинематическая цепь, включающая два движущихся контактирующих тела, соединенные последовательно через два шарнирных соединения. Третье тело представляет механическую землю и жестко соединено к инерционной лабораторной системе координат. Пользовательский smdoc_compound_rigid_bodies библиотека обеспечивает блоки подсистемы тела, используемые в примере.
Блоки Revolute Joint позволяют вам смоделировать соединения, соединяющие смежные тела, и справка установила их начальные состояния. Программное обеспечение Simscape™ Multibody™ удовлетворяет объединенной цели состояния точно, если это кинематическим образом допустимо а не в конфликте с другими целями состояния. Параметр Priority позволяет вам задать который цели попытаться удовлетворить сначала.
Запустите новую модель.
Перетащите эти блоки в модель. Два блока Шарнирного соединения предоставляют двойному маятнику две вращательных степени свободы.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape> Utilities | Solver Configuration | 1 |
| Simscape> Multibody> Utilities | Mechanism Configuration | 1 |
| Simscape> Multibody> Frames and Transforms | World Frame | 1 |
| Simscape> Multibody> Joints | Revolute Joint | 2 |
В командной строке MATLAB® введите smdoc_compound_rigid_bodies. Библиотека пользовательского блока с тем же именем открывается.
Перетащите эти пользовательские блоки в модель. Каждый блок представляет тело в двойном маятнике.
| Блок | Количество |
|---|---|
| Центр монтируется | 1 |
| Бинарная ссылка A | 2 |
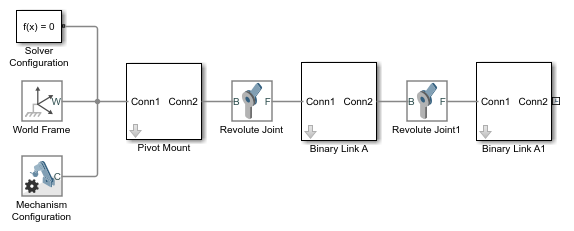
Соедините блоки как показано в фигуре.
В диалоговых окнах блока Revolute Joint выберите State Targets> Specify Position Target. Можно теперь задать желаемые стартовые позиции двух соединений.
В Value введите эти углы поворота шарнира.
| Имя блока | Значение (степени) |
|---|---|
| Шарнирное соединение | 30 |
| Вращательный Joint1 | -75 |
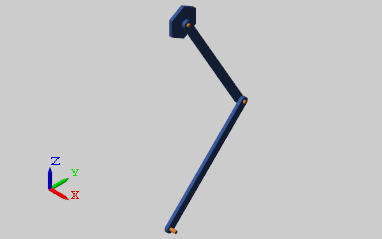
Чтобы визуализировать модель, обновите блок-схему. Во вкладке Modeling нажмите Update Model. Mechanics Explorer открывается 3-D представлением двойного блока маятника. Нажмите изометрическую кнопку представления, чтобы получить перспективу в фигуре.
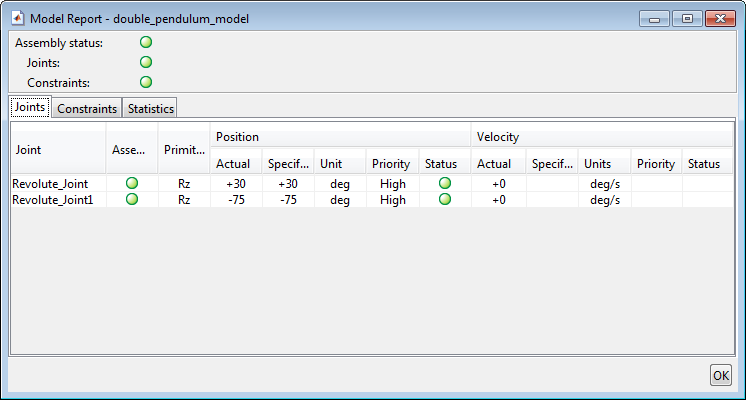
Чтобы проверять состояние блока шарнирных соединений, используйте утилиту Отчета Модели. Можно открыть эту утилиту из панели меню Mechanics Explorer путем выбора Tools> Model Report. Рисунок показывает информацию о блоке для двойного маятника.
Запустите симуляцию. Mechanics Explorer показывает 3-D анимацию двойного блока маятника. Блок перемещается из-за силы тяжести, заданной в Блоке Configuration Механизма.
Чтобы видеть полную модель двойного блока маятника, в командной строке MATLAB, войдите:
smdoc_double_pendulum
