Вычислите нормированный взаимно-простой запас устойчивости обратной связи контроллера объекта
[ возвращает нормированный взаимно-простой запас устойчивости многомерной обратной связи, состоящей из контроллера marg,freq] = ncfmargin(P,C)C в отрицательной обратной связи с объектом P:
Нормированный взаимно-простой устойчивый запас устойчивости (также названный метрическим запасом устойчивости разрыва) является индикацией относительно робастности к неструктурированным возмущениям. Значения, больше, чем 0,3 обычно, указывают на хорошие поля робастности.
[ задает знак связи обратной связи, принятой для граничного вычисления. По умолчанию, marg,freq] = ncfmargin(P,C,sign)sign = -1. Установите sign = +1 для соединения положительной обратной связи.
[ вычисляет нормированную взаимно-простую факторную метрику с заданной относительной точностью.marg,freq] = ncfmargin(___,tol)
Рассмотрите нестабильный объект первого порядка, p, стабилизированный высоким усилением и контроллерами низкого усиления, cL и cH.
p = tf(4,[1 -0.001]); cL = 1; cH = 10;
Вычислите запас устойчивости системы с обратной связью с контроллером низкого усиления.
[margL,~] = ncfmargin(p,cL)
margL = 0.7069
Точно так же вычислите запас устойчивости системы с обратной связью с контроллером высокого усиления.
[margH,~] = ncfmargin(p,cH)
margH = 0.0995
Системы с обратной связью с низким усилением и контроллерами высокого усиления нормировали взаимно-простые запасы устойчивости приблизительно 0,71 и 0.1, соответственно. Этот результат показывает, что система с обратной связью с контроллером низкого усиления более устойчива к неструктурированным возмущениям, чем система с контроллером высокого усиления.
Чтобы наблюдать это различие в робастности, создайте неопределенный объект, punc, это имеет дополнительную несмоделированную динамику в высокой частоте по сравнению с номинальным объектом.
punc = p + ultidyn('uncstruc',[1 1],'Bound',1); sigma(p,punc,'r--')

Вычислите устойчивую устойчивость систем с обратной связью, сформированных неопределенным объектом и каждым контроллером.
[stabmargL,~] = robstab(feedback(punc,cL))
stabmargL = struct with fields:
LowerBound: 0.9980
UpperBound: 1
CriticalFrequency: Inf
[stabmargH,~] = robstab(feedback(punc,cH))
stabmargH = struct with fields:
LowerBound: 0.0998
UpperBound: 0.1000
CriticalFrequency: Inf
Как ожидалось устойчивый анализ устойчивости показывает, что система с обратной связью с контроллером низкого усиления более надежно устойчива в присутствии несмоделированной динамики LTI. На самом деле эта система с обратной связью может терпеть почти 100% заданной неопределенности. В отличие от этого система с обратной связью с контроллером высокого усиления может терпеть только приблизительно 10% заданной неопределенности.
Рассмотрите объект и стабилизировавшийся контроллер.
P1 = tf([1 2],[1 5 10]); C = tf(4.4,[1 0]);
Вычислите запас устойчивости для этого объекта и контроллера.
b1 = ncfmargin(P1,C)
b1 = 0.1961
Затем вычислите разрыв между P1 и встревоженный объект, P2.
P2 = tf([1 1],[1 3 10]); [gap,nugap] = gapmetric(P1,P2)
gap = 0.1391
nugap = 0.1390
Поскольку запас устойчивости b1 = b(P1,C) больше разрыва между этими двумя объектами, C также стабилизирует P2. Как обсуждено в Метриках Разрыва и Запасах устойчивости, запасе устойчивости b2 = b(P2,C) удовлетворяет неравенству asin(b(P2,C)) ≥ asin(b1)-asin(gap). Подтвердите этот результат.
b2 = ncfmargin(P2,C); [asin(b2) asin(b1)-asin(gap)]
ans = 1×2
0.0997 0.0579
P — ОбъектОбъект, заданный как модель динамической системы. P может быть SISO или MIMO, настолько же долго как P*C имеет то же количество вводов и выводов. P может быть непрерывное время или дискретное время. Если P обобщенная модель в пространстве состояний (genss или uss) затем ncfmargin использует текущее значение или номинальную стоимость всех блоков системы управления в P.
C — КонтроллерОбъект, заданный как модель динамической системы. C может быть SISO или MIMO, настолько же долго как P*C имеет то же количество вводов и выводов. C может быть непрерывное время или дискретное время. Если C обобщенная модель в пространстве состояний (genss или uss) затем ncfmargin использует текущее значение или номинальную стоимость всех блоков системы управления в P.
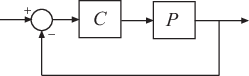
По умолчанию, ncfmargin принимает соединение отрицательной обратной связи между P и C. Чтобы вычислить поля для системы с обратной связью с положительной обратной связью, используйте [marg,freq] = ncfmargin(P,C,+1).
sign — Знак обратной связи+1Знак связи обратной связи, заданной как любой -1 или +1.
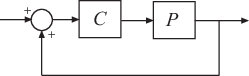
Значение по умолчанию, sign = -1, задает отрицательную обратную связь. Установка sign = +1 принимает связь положительной обратной связи для граничного вычисления, как в следующей схеме.
tol — Относительная точность Относительная точность для вычисленного поля, заданного как значение положительной скалярной величины меньше чем 1. Значение по умолчанию 0.001, или точность на 0,1%.
В то время как ncfmargin принимает цикл отрицательной обратной связи, ncfsyn команда проектирует контроллер для цикла положительной обратной связи. Поэтому вычислить поле с помощью контроллера, спроектированного с ncfsyn, используйте [marg,freq] = ncfmargin(P,C,+1).
Расчет нормированного взаимно-простого запаса устойчивости как описано в Главе 16 [1].
[1] Чжоу, K., Дойл, J.C., основы устойчивого управления. Лондон, Великобритания: Пирсон, 1997.
diskmargin | gapmetric | ncfsyn | robstab | wcdiskmargin
