daetools::massMatrixFormИзвлеките большую матрицу и правую сторону полулинейной системы дифференциальных алгебраических уравнений
Блокноты MuPAD® будут демонтированы в будущем релизе. Используйте live скрипты MATLAB® вместо этого.
Live скрипты MATLAB поддерживают большую часть функциональности MuPAD, хотя существуют некоторые различия. Для получения дополнительной информации смотрите, Преобразуют Notebook MuPAD в Live скрипты MATLAB.
MF := daetools::massMatrixForm(eqs,vars)
MF := daetools::massMatrixForm(eqs,vars) возвращает список, содержащий большую матрицу M и правая сторона уравнений F из полулинейной системы дифференциальных алгебраических уравнений первого порядка (ДАУ). Алгебраические уравнения в eqs это не содержит производных переменных в vars соответствуйте пустым строкам большой матрицы M.
Большая матрица M и правая сторона уравнений F отошлите к форме M(t,x(t)x'(t)) = F(t,x(t)).
Преобразуйте полулинейную систему дифференциальных алгебраических уравнений к форме большой матрицы.
Создайте следующую систему дифференциальных алгебраических уравнений. Здесь, x1(t) и x2(t) представляйте переменные состояния системы. Система также содержит символьные параметры r и m, и параметр f(t, x1(t), x2(t)).
eqs := [m*x2(t)*diff(x1(t), t) + m*t*diff(x2(t), t) = f(t, x1(t), x2(t)), x1(t)^2 + x2(t)^2 = r^2]; vars := [x1(t), x2(t)];

![]()
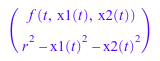
Найдите форму большой матрицы этой системы.
MF := daetools::massMatrixForm(eqs, vars): M := MF[1]; F := MF[2]
![]()
|
Список или вектор уравнений или выражений в переменных состояния |
|
Список или вектор идентификаторов или выражений, таких как |
Список двух матриц. Первая запись является большой матрицей. Количество строк является количеством уравнений в eqs, и количество столбцов является количеством переменных в vars. Второй записью является n- 1 матрица правой стороны уравнений, где n количество уравнений eqs.
