Объект для хранения 3-D облака точек
pointCloud объект создает данные об облаке точек из набора точек в 3-D системе координат. Данные об облаке точек хранятся как объект со свойствами, перечисленными в Свойствах. Используйте Функции объекта, чтобы получить, выбрать и удалить желаемые точки из данных об облаке точек.
ptCloud = pointCloud(xyzPoints,Name,Value)pointCloud объект со свойствами, заданными как один или несколько Name,Value парные аргументы. Например, pointCloud(xyzPoints,'Color',[0 0 0]) устанавливает Color свойство точки xyzPoints как [0 0 0]. Заключите каждое имя свойства в кавычки. Любые незаданные свойства имеют значения по умолчанию.
Location — Положение точек в 3-D координатном пространствеЭто свойство доступно только для чтения.
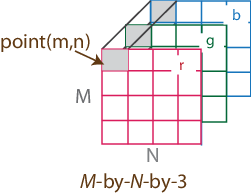
Положение точек в 3-D координатном пространстве, заданном как M-by-3 или M-by-N-by-3 массив. Каждая запись задает x, y и координаты z точки в 3-D координатном пространстве. Вы не можете установить это свойство как пару "имя-значение". Используйте xyzPoints входной параметр.
Типы данных: single
Color — Цвет облака точек[ ] (значение по умолчанию) | M-by-3 массив | M-by-N-by-3 массивЦвет облака точек, заданный как M-by-3 или M-by-N-by-3 массив. Используйте это свойство выбрать цвет точек в облаке точек. Каждая запись задает цвет RGB точки в данных об облаке точек. Поэтому можно задать тот же цвет для всех точек или различный цвет для каждой точки.
Заданные значения RGB должны лечь в области значений [0, 1], когда вы задаете тип данных для Color как single или double.
Заданные значения RGB должны лечь в области значений [0, 255], когда вы задаете тип данных для Color как uint8.
| Координаты | Допустимое присвоение Color | |
| M-by-3 массив | M-by-3 массив, содержащий значения RGB для каждой точки |
|
| M-by-N-by-3 массив | M-by-N-by-3 массив, содержащий значения RGB для каждой точки |
|
Типы данных: uint8
Normal — Поверхностные нормали[ ] (значение по умолчанию) | M-by-3 массив | M-by-N-by-3 массивПоверхностные нормали, заданные как M-by-3 или M-by-N-by-3 массив. Используйте это свойство задать вектор нормали относительно каждой точки в облаке точек. Каждая запись в поверхностных нормалях задает x, y и компонент z вектора нормали.
| Координаты | Поверхностные нормали |
|---|---|
| M-by-3 массив | M-by-3 массив, где каждая строка содержит соответствующий вектор нормали. |
| M-by-N-by-3 массив | M-by-N-by-3 массив, содержащий 1 1 3 векторами нормали для каждой точки. |
Типы данных: single | double
Intensity — Полутоновая интенсивность[ ] (значение по умолчанию) | M-by-1 вектор | M-by-N матрицаПолутоновая интенсивность в каждой точке, заданной как M-by-1 вектор или M-by-N матрица. Функция сопоставляет каждое значение интенсивности со значением цвета в текущей палитре.
| Координаты | Интенсивность |
|---|---|
| M-by-3 массив | M-by-1 вектор, где каждая строка содержит соответствующее значение интенсивности. |
| M-by-N-by-3 массив | M-by-N матрица, содержащая значение интенсивности для каждой точки. |
Типы данных: single | double | uint8
Count — Число точекЭто свойство доступно только для чтения.
Число точек в облаке точек, сохраненном как положительное целое число.
XLimits — Область значений координат xЭто свойство доступно только для чтения.
Область значений координат вдоль x - ось, сохраненная как 1 2 вектор.
YLimits — Область значений координат yЭто свойство доступно только для чтения.
Область значений координат вдоль y - ось, сохраненная как 1 2 вектор.
ZLimits — Область значений координат zЭто свойство доступно только для чтения.
Область значений координат вдоль z - ось, сохраненная как 1 2 вектор.
findNearestNeighbors | Найдите самых близких соседей точки в облаке точек |
findNeighborsInRadius | Найдите соседей в радиусе точки в облаке точек |
findPointsInROI | Найдите точки в необходимой области в облаке точек |
removeInvalidPoints | Удалите недопустимые точки из облака точек |
select | Выберите точки в облаке точек |
Считайте 3-D координатные точки в рабочую область.
load('xyzPoints');Создайте объект облака точек из координат точки ввода.
ptCloud = pointCloud(xyzPoints);
Смотрите свойства объекта облака точек.
ptCloud
ptCloud =
pointCloud with properties:
Location: [5184×3 single]
Color: []
Normal: []
Intensity: []
Count: 5184
XLimits: [-3 3.4338]
YLimits: [-2 2]
ZLimits: [0.0016 3.1437]
Отобразите облако точек при помощи pcshow.
pcshow(ptCloud)

Измените цвет данных об облаке точек
Создайте цветовую гамму RGB размера то же самое как размер данных об облаке точек. Выберите цвета точки Красному.
cmatrix = ones(size(ptCloud.Location)).*[1 0 0];
Создайте объект облака точек с набором свойства цвета к цветовой гамме RGB.
ptCloud = pointCloud(xyzPoints,'Color',cmatrix);
pcshow(ptCloud)
Добавьте поверхностные нормали в данные об облаке точек
Вычислите поверхностные нормали, соответствующие данным об облаке точек с помощью pcnormals.
normals = pcnormals(ptCloud);
Облако точки формирования данных возражает от координат точки ввода. Добавьте вычисленные поверхностные нормали в объект облака точек.
ptCloud = pointCloud(xyzPoints,'Normal',normals);Отобразите облако точек и постройте поверхностные нормали.
pcshow(ptCloud) x = ptCloud.Location(:,1); y = ptCloud.Location(:,2); z = ptCloud.Location(:,3); u = normals(:,1); v = normals(:,2); w = normals(:,3); hold on quiver3(x,y,z,u,v,w); hold off

pointCloud объектом является handle объект. Если вы хотите создать отдельную копию облака точек, можно использовать MATLAB®
copy метод.
ptCloudB = copy(ptCloudA) |
Если вы хотите сохранить одну копию облака точек, которое может быть изменено функциями облака точек, использовать то же имя переменной облака точек во вводе и выводе.
ptCloud = pcFunction (ptCloud) |