Реализуйте представление кватерниона шести уравнений степеней свободы движения массы простой переменной относительно осей ветра
Уравнения Motion/6DOF
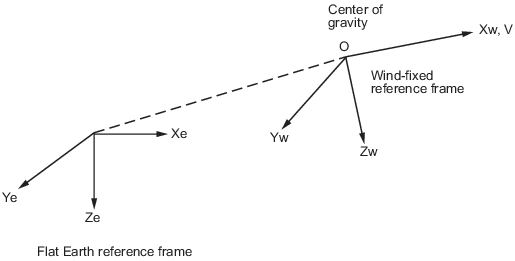
Блок Simple Variable Mass 6DOF Wind (Quaternion) рассматривает вращение зафиксированной ветром координатной системы координат (Xw, Yw, Zw) о плоской Наземной системе координат (Xe, Ye, Ze). Источник зафиксированной ветром координатной системы координат является центром тяжести тела, и тело принято, чтобы быть твердым, предположение, которое избавляет от необходимости рассматривать силы, действующие между отдельными элементами массы. Плоская Наземная система координат рассматривается инерционной, превосходное приближение, которое позволяет силам из-за движения Земли относительно “фиксированных звезд” быть пропущенными.
Поступательное движение зафиксированной ветром координатной системы координат приведено ниже, где приложенные силы [финансовый год Fx Fz] T находятся в зафиксированной ветром системе координат. Vre w является относительной скоростью в осях ветра в который массовый поток () извлекается или добавляется к телу.
Вращательные движущие силы зафиксированной телом системы координат приведены ниже, где прикладные моменты [L M N] T, и тензор инерции, I относительно источника O. Тензор инерции I намного легче задать в зафиксированной телом системе координат.
Тензор инерции определяется с помощью поиска по таблице, который линейно интерполирует между Ifull и Iempty на основе массы (m). В то время как скорость изменения тензора инерции оценивается следующим уравнением.
Интегрирование скорости изменения вектора кватерниона приведено ниже.
Aerospace Blockset™ использует кватернионы, которые заданы с помощью скалярного первого соглашения.
Задает модули ввода и вывода:
| Модули | Силы | Момент | Ускорение | Скорость | Положение | Масса | Инерция |
|---|---|---|---|---|---|---|---|
Metric (MKS) | Ньютон | Ньютон-метр | Метры в секунду придали квадратную форму | Метры в секунду | Метры | Килограмм | Килограммометр придал квадратную форму |
English (Velocity in ft/s) | Фунт | Фунт ноги | Ноги в секунду придали квадратную форму | Ноги в секунду | Футы | Краткий заголовок | Отложите нога придала квадратную форму |
English (Velocity in kts) | Фунт | Фунт ноги | Ноги в секунду придали квадратную форму | Узлы | Футы | Краткий заголовок | Отложите нога придала квадратную форму |
Выберите тип массы, чтобы использовать:
Fixed | Масса является постоянной в течение симуляции. |
Simple Variable | Масса и инерция варьируются линейно как функция массового уровня. |
Custom Variable | Масса и изменения инерции настраиваемы. |
Simple Variable выбор соответствует ранее описанным уравнениям движения.
Выберите представление использованию:
Wind Angles | Используйте углы ветра в рамках уравнений движения. |
Quaternion | Используйте кватернионы в рамках уравнений движения. |
Quaternion выбор соответствует ранее описанным уравнениям движения.
Трехэлементный вектор для начального местоположения тела в плоской Наземной системе координат.
Трехэлементный вектор, содержащий начальную скорость полета, начальный угол заноса и начальный угол нападения.
Трехэлементный вектор, содержащий начальные углы ветра [банк, курс полета, и направляющийся], в радианах.
Трехэлементный вектор для начальной буквы зафиксированные телом угловые уровни, в радианах в секунду.
Начальная масса твердого тела.
Скалярное значение для инерции тела.
Скалярное значение для пустой массы тела.
Скалярное значение для полной массы тела.
3х3 матрица тензора инерции для пустой инерции тела, в зафиксированных телом осях.
3х3 матрица тензора инерции для полной инерции тела, в зафиксированных телом осях.
Установите этот флажок, чтобы добавить массовый скоростной порт родственника потока. Это - относительная скорость, при которой масса аккумулируется или удаляется.
Установите этот флажок, чтобы включить дополнительный выходной порт для ускорений в зафиксированных телом осях относительно инерционной системы координат. Вы обычно соединяете этот сигнал с акселерометром.
Присвойте уникальное имя каждому состоянию. Можно использовать имена состояния вместо путей к блоку во время линеаризации.
Чтобы присвоить имя к одному состоянию, введите уникальное имя между кавычками, например, 'velocity'.
Чтобы присвоить имена к нескольким состояниям, введите разграниченный запятой список, окруженный фигурными скобками, например, {'a', 'b', 'c'}. Каждое имя должно быть уникальным.
Если параметр пуст (' '), никакое присвоение имени не происходит.
Имена состояния применяются только к выбранному блоку параметром имени.
Количество состояний должно разделиться равномерно среди количества имен состояния.
Можно задать меньше имен, чем состояния, но вы не можете задать больше имен, чем состояния.
Например, можно задать два имени в системе с четырьмя состояниями. Имя применяется к первым двум состояниям и второму имени к последним двум состояниям.
Чтобы присвоить имена состояния с переменной в рабочей области MATLAB®, введите переменную без кавычек. Переменная может быть вектором символов, массивом ячеек или структурой.
Задайте имена состояния положения.
Значением по умолчанию является ''.
Задайте скоростное имя состояния.
Значением по умолчанию является ''.
Задайте имя состояния угла установки.
Значением по умолчанию является ''.
Задайте угловое имя состояния заноса.
Значением по умолчанию является ''.
Задайте имена состояния ориентации ветра. Этот параметр появляется, если параметр Representation устанавливается на Wind Angles.
Значением по умолчанию является ''.
Задайте имена состояния вектора кватерниона. Этот параметр появляется, если параметр Representation устанавливается на Quaternion.
Значением по умолчанию является ''.
Задайте имена состояния уровня вращения тела.
Значением по умолчанию является ''.
Задайте массовое имя состояния.
Значением по умолчанию является ''.
| Входной параметр | Тип размерности | Описание |
|---|---|---|
Сначала | Вектор | Содержит эти три приложенных силы в зафиксированных ветром осях. |
Второй | Вектор | Содержит три прикладных момента в зафиксированных телом осях. |
Треть | Скаляр или вектор | Содержит одну или несколько скоростей изменения массы. |
Четвертый (Необязательно) | Вектор | Содержит одну или несколько относительных скоростей, при которых масса аккумулируется к или удаляется от тела в осях ветра. |
| Вывод | Тип размерности | Описание |
|---|---|---|
Сначала | Трехэлементный вектор | Содержит скорость в плоской Наземной системе координат. |
Второй | Трехэлементный вектор | Содержит положение в плоской Наземной системе координат. |
Треть | Трехэлементный вектор | Содержит углы поворота ветра [банк, курс полета, направляясь], в радианах. |
Четвертый | 3х3 матрица | Применяется к координатному преобразованию от плоских Наземных осей до зафиксированных ветром осей. |
Пятый | Трехэлементный вектор | Содержит скорость в зафиксированной ветром системе координат. |
Шестой | Двухэлементный вектор | Содержит угол нападения и угол заноса, в радианах. |
Седьмой | Двухэлементный вектор | Содержит скорость изменения угла нападения и скорость изменения угла заноса, в радианах в секунду. |
Восьмой | Трехэлементный вектор | Содержит угловые уровни в зафиксированных телом осях, в радианах в секунду. |
Девятый | Трехэлементный вектор | Содержит угловые ускорения в зафиксированных телом осях, в радианах в секунду придал квадратную форму. |
Десятый | Трехэлементный вектор | Содержит ускорения в зафиксированных телом осях относительно системы координат тела. |
Одиннадцатый | Скалярный элемент | Содержит флаг для состояния топливного бака:
|
Двенадцатый | Трехэлементный вектор | Содержит ускорения в зафиксированных телом осях относительно инерционной системы координат (плоская Земля). Вы обычно соединяете этот сигнал с акселерометром. |
Блок принимает, что приложенные силы действуют в центре тяжести тела.
Стивенс, Брайан, и Франк Льюис, управление самолетом и Simulation, Second Edition, John Wiley & Sons, 2003.
Zipfel, Питер Х., моделирование и симуляция космической динамики аппарата. Второй выпуск, образовательный ряд AIAA, 2007.
6-я масса точки порядка (скоординированный рейс)
Пользовательская переменная масса 6DOF (углы Эйлера)
Пользовательская переменная масса 6DOF (кватернион)
Пользовательская переменная масса 6DOF ECEF (кватернион)
Пользовательская переменная масса 6DOF ветер (кватернион)
Пользовательская переменная масса 6DOF ветер (углы ветра)
Масса простой переменной 6DOF (углы Эйлера)
Масса простой переменной 6DOF (кватернион)
Масса простой переменной 6DOF ECEF (кватернион)
