Ориентированное на дорожку средство отслеживания мультигипотезы
Sensor Fusion and Tracking Toolbox
Обнаружения процессов блока Track-Oriented Multi-Hypothesis Tracker много целей от нескольких датчиков. Блок средства отслеживания инициализирует, подтверждает, предсказывает, корректирует и удаляет дорожки. Входные параметры с блоком средства отслеживания являются отчетами обнаружения, сгенерированными objectDetection, radarSensor, monostaticRadarSensor, irSensor, или sonarSensor объекты. Блок средства отслеживания оценивает ковариационную матрицу вектора состояния и вектора состояния для каждой дорожки. Средство отслеживания присваивает обнаружения на основе ориентированного на дорожку, подход мультигипотезы.
Любой новый трек запускается в предварительном состоянии. Если достаточно обнаружений присвоено предварительной дорожке, ее изменениям состояния в подтвержденном. Если обнаружение уже имеет известную классификацию (ObjectClassID поле возвращенной дорожки является ненулевым), та дорожка сразу подтверждена. Когда дорожка подтверждена, мультиобъектное средство отслеживания полагает, что дорожка представляет физический объект. Если обнаружения не присвоены дорожке в specifiable количестве обновлений, дорожка удалена. Для обзора того, как средство отслеживания функционирует, см. Алгоритмы.
Detections — Список обнаруженийСписок обнаружений в виде шины Simulink, содержащей структуру MATLAB. Структура имеет форму:
| Поле | Описание | Ввод |
|---|---|---|
NumDetections | Количество обнаружений | Целое число |
Detections | Обнаружения объектов | Массив objectDetection структуры. Первый NumDetections из этих обнаружений фактические обнаружения. |
Поля структуры обнаружений:
| Поле | Описание | Ввод |
|---|---|---|
Time | Время измерения | Single или Double |
Measurement | Объектные измерения | Single или Double |
MeasurementNoise | Ковариационная матрица шума измерения | Single или Double |
SensorIndex | Уникальный идентификатор датчика | Single или Double |
ObjectClassID | ID предметной классификации | Single или Double |
MeasurementParameters | Параметры используются функциями инициализации отслеживания фильтров | Шина Simulink |
ObjectAttributes | Дополнительная информация передала средству отслеживания | Шина Simulink |
Смотрите objectDetection для более подробного объяснения этих полей.
Структура обнаружения объектов содержит Time поле . Тег времени каждого обнаружения объектов должен быть меньше чем или равен времени при текущем вызове блока. Тег времени должен также быть больше времени обновления, заданного в предыдущем вызове блока.
Prediction Time — Отследите время обновленияОтследите время обновления в виде действительного скаляра в секундах. Средство отслеживания обновляет все дорожки к этому времени. Время обновления должно всегда увеличиваться с каждым вызовом блока. Время обновления должно быть, по крайней мере, столь же большим как самый большой Time заданный во входном порту Detections.
Если порт не включен, часы симуляции, управляемые Simulink, определяют время обновления.
Чтобы включить этот порт, на вкладке Port Setting, устанавливают Prediction time source на Input port.
Cost Matrix — Стойте матрицыСтойте матрицы в виде N с действительным знаком-by-M матрица, где N является количеством ветвей, и M является количеством текущих обнаружений.
Строки матрицы стоимости должны быть в том же порядке как список ветвей. Ветви упорядочены, когда они появляются в списке ветвей от выходного порта All Branches на предыдущем вызове блока. Столбцы соответствуют обнаружениям.
В первом обновлении средства отслеживания, или если средство отслеживания не имеет никаких предыдущих дорожек, присвоение, стоимость матрицирует размер [0, N]. Стоимость должна быть вычислена так, чтобы более низкие цены указали на более высокую вероятность, что средство отслеживания присваивает обнаружение дорожке. Чтобы препятствовать тому, чтобы определенные обнаружения были присвоены определенным дорожкам, используйте Inf.
Если этот порт не включен, фильтр, инициализированный Filter initialization function, вычисляет матрицу стоимости использование метода расстояния.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable cost matrix input.
Detectable BranchIDs — Обнаруживаемые идентификаторы ветвиОбнаруживаемые идентификаторы ветви в виде M с действительным знаком-by-1 вектор или M-by-2 матрица. Обнаруживаемые ветви являются ветвями, которые датчики ожидают обнаруживать. Первый столбец матрицы содержит список идентификаторов ветви, о которых датчики сообщают как обнаруживаемые. Дополнительный второй столбец позволяет вам добавить вероятность обнаружения для каждой ветви. Ветви перечислены в All Branches выход от предыдущего вызова блока.
Дорожки, идентификаторы которых не включены в Detectable BranchIDs, рассматриваются необнаруживаемыми. Логика удаления дорожки не считает отсутствие обнаружения как "пропущенное обнаружение" в целях удаления дорожки.
Если этот порт не включен, средство отслеживания принимает все дорожки, чтобы быть обнаруживаемым при каждом вызове блока.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable detectable branch IDs input.
Confirmed Tracks — Подтвержденные дорожкиПодтвержденные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Структура имеет форму:
| Поле | Описание |
|---|---|
NumTracks | Количество дорожек |
Tracks | Массив структур дорожки длины установлен параметром Maximum number of tracks. Только первый NumTracks из них фактические дорожки. |
Поля структуры дорожки показывают в Структуре Дорожки.
Дорожка подтверждена, если она удовлетворяет порогу, заданному в the Confirmation threshold параметре под вкладкой Track Logic.
Tentative Tracks — Предварительные дорожкиПредварительные дорожки, возвращенные как шина Simulink, содержащая структуру MATLAB. Дорожка является предварительной, прежде чем она будет подтверждена.
Поля структуры дорожки показывают в Структуре Дорожки.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable tentative tracks output.
All Tracks — Подтвержденные и предварительные дорожкиОбъединенный список подтвержденных и предварительных дорожек, возвращенных как шина Simulink, содержащая структуру MATLAB.
Поля структуры дорожки показывают в Структуре Дорожки.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable all tracks output.
Info — Дополнительная информация для анализа обновлений дорожкиДополнительная информация для анализа обновлений дорожки, возвращенных как шина Simulink, содержащая структуру MATLAB.
Эта таблица показывает поля информационной структуры:
| Поле | Описание |
BranchIDsAtStepBeginning | Идентификаторы ветви, когда обновление началось. |
CostMatrix | Стоимость матрицы присвоения. |
Assignments | Присвоения возвращены в |
UnassignedTracks | Идентификаторы неприсвоенных ветвей возвращены в средство отслеживания. |
UnassignedDetections | Идентификаторы неприсвоенных обнаружений возвращены в средство отслеживания. |
InitialBranchHistory | История ветви после ответвления и перед сокращением. |
InitialBranchScores | Баллы ветви перед сокращением. |
KeptBranchHistory | История ветви после начального сокращения. |
KeptBranchScores | Баллы ветви после начального сокращения. |
Clusters | Отображение логического массива переходит к кластерам. Ветви принадлежат того же кластера, если они совместно используют обнаружения в своей истории или принадлежат той же дорожке или непосредственно или посредством других ветвей. |
TrackIncompatibility | Матрица несовместимости ветви. |
GlobalHypotheses | Логическое матричное отображение переходит к глобальным гипотезам. Совместимые ветви могут принадлежать тех же гипотез. |
GlobalHypScores | Общий счет глобальных гипотез. |
PrunedBranches | Логический массив ветвей, что |
GlobalBranchProbabilities | Глобальная вероятность каждой ветви, существующей в глобальных гипотезах. |
BranchesDeletedByPruning | Ветви удалены средством отслеживания. |
BranchIDsAtStepEnd | Идентификаторы ветви, когда законченное обновление. |
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable information output.
All Branches — Все ветвиВсе ветви, возвращенные как шина Simulink, содержащая структуру MATLAB.
Поля структуры ветви совпадают со Структурой Дорожки.
Чтобы включить этот порт, на вкладке Port Setting, выбирают Enable all branches output.
Tracker identifier — Уникальный идентификатор средства отслеживанияУникальный идентификатор средства отслеживания в виде неотрицательного целого числа. Этот параметр передается как SourceIndex в средстве отслеживания выходные параметры, и отличают дорожки, которые прибывают из различных средств отслеживания в системе нескольких-средств-отслеживания. Необходимо задать это свойство как положительное целое число, чтобы использовать дорожку выходные параметры в качестве входных параметров к trackFuser объект.
Пример 1
Filter initialization function — Отфильтруйте функцию инициализации@initcvekf (значение по умолчанию) | указатель на функцию | вектор символовОтфильтруйте функцию инициализации в виде указателя на функцию или как вектор символов, содержащий имя функции инициализации фильтра. Средство отслеживания использует функцию инициализации фильтра при создании новых треков.
Sensor Fusion and Tracking Toolbox™ обеспечивает много функций инициализации, которые совместимы с этим блоком.
| Функция инициализации | Функциональное определение |
|---|---|
initcvabf | Инициализируйте фильтр альфы - беты постоянной скорости |
initcaabf | Инициализируйте фильтр альфы - беты постоянного ускорения |
initcvekf | Инициализируйте расширенный Фильтр Калмана постоянной скорости. |
initcackf | Инициализируйте фильтр кубатуры постоянного ускорения. |
initctckf | Инициализируйте фильтр кубатуры постоянной угловой скорости вращения. |
initcvckf | Инициализируйте фильтр кубатуры постоянной скорости. |
initcapf | Инициализируйте фильтр частиц постоянного ускорения. |
initctpf | Инициализируйте фильтр частиц постоянной угловой скорости вращения. |
initcvpf | Инициализируйте фильтр частиц постоянной скорости. |
initcvkf | Инициализируйте постоянную скорость линейный Фильтр Калмана. |
initcvukf | Инициализируйте сигма-точечный фильтр Калмана постоянной скорости. |
initcaekf | Инициализируйте расширенный Фильтр Калмана постоянного ускорения. |
initcakf | Инициализируйте постоянное ускорение линейный Фильтр Калмана. |
initcaukf | Инициализируйте сигма-точечный фильтр Калмана постоянного ускорения. |
initctekf | Инициализируйте расширенный Фильтр Калмана постоянной угловой скорости вращения. |
initctukf | Инициализируйте сигма-точечный фильтр Калмана постоянной угловой скорости вращения. |
initcvmscekf | Инициализируйте измененные сферические координаты постоянной скорости, расширил Фильтр Калмана. |
initrpekf | Инициализируйте постоянную скорость параметризованный областью значений расширенный Фильтр Калмана. |
initapekf | Инициализируйте постоянную скорость параметризованный углом расширенный Фильтр Калмана. |
initekfimm | Инициализируйте отслеживание фильтр IMM. |
Можно также записать собственную функцию инициализации. Функция должна иметь следующий синтаксис:
filter = filterInitializationFcn(detection)
objectDetection объект. Выход этой функции должен быть объектом фильтра: trackingKF, trackingEKF, trackingUKF, trackingCKF, trackingPF, trackingMSCEKF, trackingGSF, trackingIMM, или trackingABF.
Чтобы вести вас в записи этой функции, можно исследовать детали поддерживаемых функций из MATLAB. Например:
type initcvekfТипы данных: function_handle | char
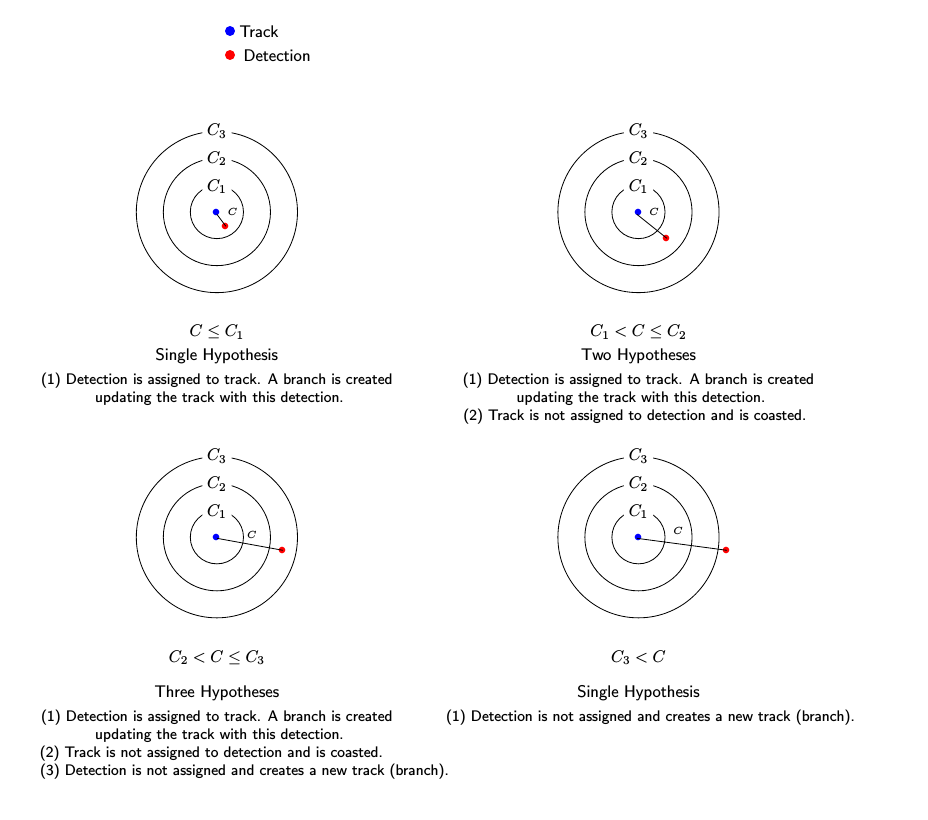
Threshold for assigning detections to tracks — Порог для присвоения обнаружений к дорожкам30*[0.3 0.7 1 Inf] (значение по умолчанию) | положительная скалярная величина | 1 3 вектор положительных значений | вектор 1 на 4 положительных значенийПорог для присвоения обнаружений к дорожкам в виде положительной скалярной величины, 1 3 вектор неуменьшения положительных значений, [C 1, C 2, C 3], или a1-4 вектор неуменьшения положительных значений, [C 1, C 2, C 3, C 4]. Если задано как скаляр, заданное значение, val, будет расширено до [0.3,0.7,1, Inf] *val. Если задано как [C 1, C 2, C 3], это будет расширено как [C 1, C 2, C 3, Inf].
Пороги управляют (1) присвоением обнаружения к дорожке, (2) созданием новой ветви от обнаружения и (3) созданием новой ветви от неприсвоенной дорожки. Пороговые значения должны удовлетворить: C 1 <= C 2 <= C 3<=C4.
C 1 задает расстояние, таким образом, что, если дорожка имеет присвоенное обнаружение с более низким расстоянием, чем C 1, дорожка больше не рассматривается неприсвоенной и не создает неприсвоенную ветвь дорожки.
C 2 задает расстояние, таким образом, что, если обнаружение было присвоено дорожке с более низким расстоянием, чем C 2, обнаружение больше не рассматривается неприсвоенным и не создает ветвь нового трека.
C 3 задает максимальное расстояние для присвоения обнаружения к дорожке.
C 4 задает комбинации дорожки и обнаружения, для которого выполняется точный нормированный расчет стоимости. Первоначально, средство отслеживания выполняет крупную оценку для нормированного расстояния между всеми дорожками и обнаружениями. Средство отслеживания только вычисляет точное нормированное расстояние для комбинаций, крупное нормированное расстояние которых меньше C 4.
Советы:
Увеличьте значение C 3, если существуют обнаружения, которые должны быть присвоены дорожкам, но не являются. Уменьшите значение, если существуют обнаружения, которые присвоены дорожкам, которым они не должны быть присвоены (слишком далеко).
Увеличение значений, C 1 и C 2 помогает управлять количеством ветвей дорожки, которые создаются. Однако выполнение так сокращает количество ветвей (гипотезы), каждая дорожка имеет.
Увеличьте значение C 4, если существуют комбинации дорожки и обнаружения, которое должно быть вычислено для присвоения, но не является. Уменьшите его, если расчет стоимости занимает слишком много времени.
Типы данных: single | double
Maximum number of tracks — Максимальное количество дорожекМаксимальное количество дорожек, которые блок может обеспечить в виде положительного целого числа.
Maximum number of sensors — Максимальное количество датчиковМаксимальное количество датчиков, которые могут быть соединены со средством отслеживания в виде положительного целого числа. MaxNumSensors должен быть больше или быть равен самому большому значению SensorIndex найденный во всех обнаружениях раньше обновлял средство отслеживания. SensorIndex одно из свойств objectDetection объект. MaxNumSensors блока свойство определяет сколько наборов ObjectAttributes поля каждая выходная дорожка могут иметь.
Track state parameters — Параметры системы координат состояния дорожкойstruct | struct arrayПараметры системы координат состояния дорожкой в виде struct или массива структур. Используйте это свойство задать систему координат состояния дорожки и как преобразовать дорожку от средства отслеживания (названный источником) система координат к системе координат термофиксатора.
Типы данных: struct
Track output method — Отследите выходной метод'Tracks' (значение по умолчанию) | 'Hypothesis' | 'Clusters'Отследите выходной метод в виде 'Tracks', 'Hypothesis', или 'Clusters'.
'Tracks' – Выведите центроид каждой дорожки на основе ее ветвей дорожки.
'Hypothesis' – Выведите ветви, которые находятся в определенных гипотезах. Если вы выбираете эту опцию, перечисляете гипотезы, чтобы вывести использование HypothesesToOutput свойство.
'Clusters' – Выведите центроид каждого кластера. Подобно 'Tracks' выведите, но включает все дорожки в кластере.
Типы данных: char
Simulate using — Тип симуляции, чтобы запуститьсяInterpreted Execution (значение по умолчанию) | Code GenerationInterpreted execution — Симулируйте модель с помощью интерпретатора MATLAB. Эта опция сокращает время запуска. В Interpreted execution режим, можно отладить исходный код блока.
Code generation — Симулируйте модель с помощью сгенерированного кода C. В первый раз, когда вы запускаете симуляцию, Simulink генерирует код С для блока. Код С снова используется для последующих симуляций, пока модель не изменяется. Эта опция требует дополнительного времени запуска.
Maximum number of hypotheses to be maintained — Максимальное количество гипотез, которые будут обеспеченыМаксимальное количество гипотез обеспечено дорожками в случаях неоднозначности в виде положительного целого числа. Большие значения увеличивают вычислительную загрузку.
Пример: 10
Типы данных: single | double
Maximum number of track branches per track — Максимальное количество дорожки переходит на дорожкуМаксимальное количество ветвей дорожки (гипотезы) допускало каждую дорожку в виде положительного целого числа. Большие значения увеличивают вычислительную загрузку.
Типы данных: single | double
Maximum number of scans maintained in the branch history — Максимальное количество сканирований обеспечено в истории ветвиМаксимальное количество сканирований обеспечено в истории ветви в виде положительного целого числа. Количество сканирований истории дорожки обычно от 2 до 6. Большие значения увеличивают вычислительную загрузку.
Типы данных: single | double
Minimum probability required to keep a branch — Минимальная вероятность, требуемая сохранить ветвьМинимальная вероятность, требуемая отслеживать дорожку, переходит в виде положительной скалярной величины меньше чем один. Любая дорожка с вероятностью ниже, чем заданная вероятность сокращена. Типичные значения 0.001 к 0,005.
Пример: .003
Типы данных: single | double
N-scan pruning method — Метод сокращения N-сканирования'None' (значение по умолчанию) | 'Hypothesis'Метод сокращения N-сканирования в виде 'None' или 'Hypothesis'. В сокращении N-сканирования ветви, которые принадлежат той же дорожке, сокращены (удаленные), если в истории N-сканирований они противоречат наиболее вероятной ветви для той же дорожки. Наиболее вероятная ветвь задана одним из двух способов:
'None' – Никакое сокращение N-сканирования не выполняется.
'Hypothesis' – Выбранная ветвь находится в наиболее вероятной гипотезе.
Пример: 'Hypothesis'
Confirmation threshold [positive scalar] — Минимальный счет, требуемый подтвердить дорожкуМинимальный счет, требуемый подтвердить дорожку в виде положительной скалярной величины. Любая дорожка со счетом выше, чем этот порог подтверждена.
Пример: 12
Типы данных: single | double
Deletion threshold [negative scalar] — Максимальное отбрасывание счета для удаления дорожкиМаксимальное отбрасывание счета перед дорожкой удалено в виде скаляра. Любая дорожка со счетом, который падает больше, чем этим параметром от максимального счета, удалена. Порог удаления затронут вероятностью ложного предупреждения.
Пример 1
Типы данных: single | double
Probability of detection used for track score — Вероятность обнаружения используется в счете дорожкиВероятность обнаружения в виде положительной скалярной величины между 0 и 1. Это свойство используется для расчета счет дорожки.
Пример: 0.5
Типы данных: single | double
Rate of false positives used for track score — Вероятность ложного предупреждения используется в счете дорожки1e-6 (значение по умолчанию) | скалярВероятность ложного предупреждения в виде скаляра. Это свойство используется для расчета счет дорожки.
Пример: 1e-5
Типы данных: single | double
Volume of the sensor's detection bin — Объем интервала измерения датчикаОбъем интервала измерения датчика в виде положительной скалярной величины. Например, если радар производит 4-D измерение, которое включает азимут, вертикальное изменение, область значений и уровень области значений, 4-D объем задан радаром угловая ширина луча, ширина интервала области значений и ширина интервала уровня области значений. Объем используется в вычислении счета дорожки при инициализации и обновлении дорожки.
Пример: 1.5
Типы данных: single | double
Rate of new tracks per unit volume — Уровень новых треков на единичный объемУровень новых треков на единичный объем в виде положительной скалярной величины. Параметр используется в вычислении счета дорожки во время инициализации дорожки.
Пример: 2.5
Типы данных: single | double
Prediction time source — Источник времени предсказанияAuto (значение по умолчанию) | Input portИсточник в течение времени предсказания в виде Input port или Auto. Выберите Input port вводить время обновления при помощи входного порта Prediction Time. В противном случае часы симуляции, управляемые Simulink, определяют время обновления.
Enable cost matrix input — Включите входной порт для матрицы стоимостиВыберите этот параметр, чтобы включить вход матрицы стоимости при помощи входного порта Cost Matrix.
Enable detectable branch IDs input — Включите обнаруживаемый вход IDs ветвиВыберите этот параметр, чтобы включить входной порт Detectable branch IDs.
Enable tentative tracks output — Включите выходной порт для предварительных дорожекВыберите этот параметр, чтобы включить выход предварительных дорожек через выходной порт Tentative Tracks.
Enable all tracks output — Включите выходной порт для всех дорожекВыберите этот параметр, чтобы включить выход всех дорожек через выходной порт All Tracks.
Enable information output — Включите выходной порт для получения информации об анализеВыберите этот параметр, чтобы включить выходной порт для получения информации об анализе через выходной порт Info.
Enable all branches output — Включите выходной порт для всех ветвейВыберите этот параметр, чтобы включить выход всех ветвей через выходной порт All Branches.
Source of output bus name — Источник выхода отслеживает имя шиныAuto (значение по умолчанию) | PropertyИсточник выхода отслеживает имя шины в виде:
Auto — Блок автоматически создает выходное имя шины дорожки.
Property — Задайте выходное имя шины дорожки при помощи параметра Specify an output bus name.
Source of output info bus name — Источник выходной информации соединяет шиной имяAuto (значение по умолчанию) | PropertyИсточник информации о выходе соединяет шиной имя в виде:
Auto — Блок автоматически создает имя шины информации о выходе.
Property — Задайте имя шины информации о выходе при помощи параметра Specify an output info bus name.
Чтобы включить этот параметр, на вкладке Port Setting, выбирают Enable information output.
Когда вы обрабатываете обнаружения с помощью средства отслеживания, отслеживаете создание, и управление выполняют эти шаги.
Средство отслеживания пытается присвоить обнаружения существующим дорожкам.
Дорожка допускает несколько гипотез о присвоении обнаружений к дорожкам.
Неприсвоенные обнаружения приводят к созданию новых треков.
Присвоения обнаружений к дорожкам создают ветви для присвоенных дорожек.
Дорожки без присвоенных обнаружений курсируются (предсказанные).
Все ветви дорожки выиграны. Ветви с низкими начальными баллами сокращены.
Сгенерированы кластеры ветвей, которые совместно используют обнаружения (несовместимые ветви) в их истории.
Глобальные гипотезы совместимых ветвей сформулированы и выиграны.
Ветви выиграны на основе их существования в глобальных гипотезах. Низко выигранные ветви сокращены.
Дополнительное сокращение выполняется на основе истории N-сканирования.
Все дорожки откорректированы и предсказаны к входному времени.
Три порога присвоения, C 1, C 2, и C 3, управляют (1) присвоением обнаружения к дорожке, (2) созданием новой ветви от обнаружения и (3) созданием новой ветви от неприсвоенной дорожки. Пороговые значения должны удовлетворить: C 1 <= C 2 <= C 3.
Если стоимостью присвоения является C = costmatrix(i,j), следующие гипотезы создаются на основе сравнения стоимости для значений порогов присвоения. Ниже каждого сравнения существует список возможных гипотез.
Советы:
Увеличьте значение C 3, если существуют обнаружения, которые должны быть присвоены дорожкам, но не являются. Уменьшите значение, если существуют обнаружения, которые присвоены дорожкам, которым они не должны быть присвоены (слишком далеко).
Увеличение значений, C 1 и C 2 помогает управлять количеством ветвей дорожки, которые создаются. Однако выполнение так сокращает количество ветвей (гипотезы), каждая дорожка имеет.
Чтобы позволить каждой дорожке, которая будет неприсвоенной, устанавливает C 1 = 0.
Чтобы позволить каждому обнаружению, которое будет неприсвоенным, устанавливает C 2 = 0.
Все числовые входные параметры могут быть одинарные или двойная точность, но у них всех должна быть та же точность.
Поля структуры дорожки:
| Поле | Определение |
|---|---|
SourceIndex | Уникальный исходный индекс раньше отличал источники отслеживания в среде средства отслеживания кратного. |
TrackID | Уникальный идентификатор дорожки раньше отличал несколько дорожек. |
BranchID | Уникальный идентификатор ветви дорожки раньше отличал несколько ветвей дорожки. |
UpdateTime | Время, в которое обновляется дорожка. Модули находятся в секундах. |
Age | Число раз пережившая дорожка. |
State | Значение вектора состояния во время обновления. |
StateCovariance | Ковариационная матрица неопределенности. |
TrackLogic | Подтверждение и тип логики удаления, возвращенный как 'History' или 'Integrated'. |
TrackLogicState | Текущее состояние типа логики дорожки. На основе логического типа
|
IsConfirmed | Состояние Confirmation. Этим полем является true если дорожка подтверждена, чтобы быть действительной целью. |
IsCoasted | Состояние Coasting. Этим полем является true если дорожка обновляется без нового обнаружения. |
IsSelfReported | Укажите, сообщает ли о дорожке средство отслеживания. Это поле используется в среде сплава дорожки. Это возвращено как |
ObjectClassID | Целочисленное значение, представляющее предметную классификацию. Значение 0 представляет неизвестную классификацию. Ненулевые классификации применяются только к подтвержденным дорожкам. |
ObjectAttributes | Дополнительная информация дорожки. |
[1] Вертманн, J. R. "Постепенное Описание В вычислительном отношении Эффективной Версии Нескольких Отслеживание Гипотезы". В международном обществе Оптики и Фотоники, Издания 1698, стр 228-301, 1992.
[2] Блэкмен, S. и R. Пополи. Проект и анализ современных систем слежения. Радарная библиотека дома Artech, Бостон, 1999.
objectDetection | objectTrack | trackingABF | trackingCKF | trackingEKF | trackingGSF | trackingIMM | trackingKF | trackingMSCEKF | trackingPF | trackingUKF1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
