На этом шаге вы выполняете усиление, настраивающееся для d - оси и q - ось текущий контроллер вручную.
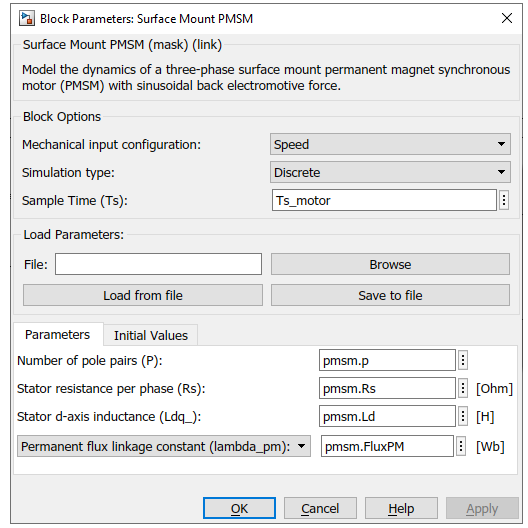
Этот шаг является дополнительным, но помогает вам настроить параметры усиления управления для текущего контроллера. Обеспечьте ступенчатое изменение для Id_ref и анализируйте текущую производительность контроллера от переходного процесса Id_meas. Повторите тот же процесс для Iq_ref настроить q - ось текущий контроллер. В модели объекта управления заблокируйте ротор, чтобы гарантировать, что двигатель не вращается, когда вы обеспечиваете ступенчатое изменение для Id_ref или Iq_ref. В Поверхностном монтаже диалоговое окно параметров блоков PMSM, установленное параметр Mechanical input configuration на Speed. Обеспечьте вход Spd (блока Surface Mount PMSM) как 0 гарантировать, что ротор заблокирован.
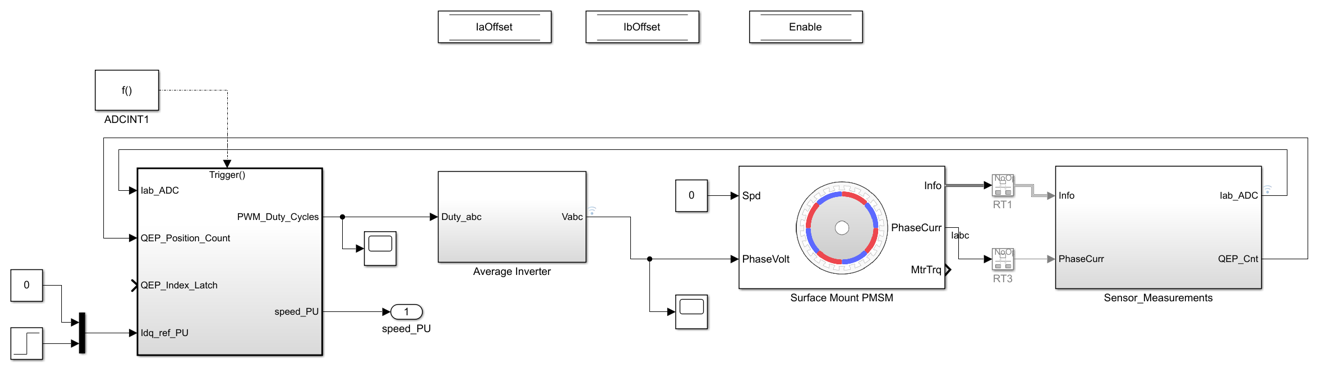
Имитационная модель предприятия с законченным циклом производства и подсистемы контроллера позволяет вам вручную настраивать усиления текущего контроллера. Предоставьте вход шага Iq_ref в области значений (0 к 0.2) PU и наблюдают измеренную обратную связь. Настройте параметры управления текущего контроллера, чтобы достигнуть ваших целей управления.
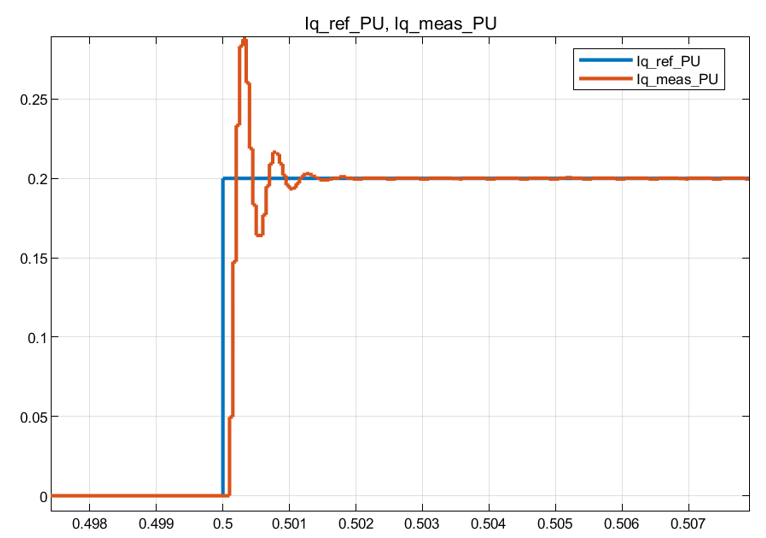
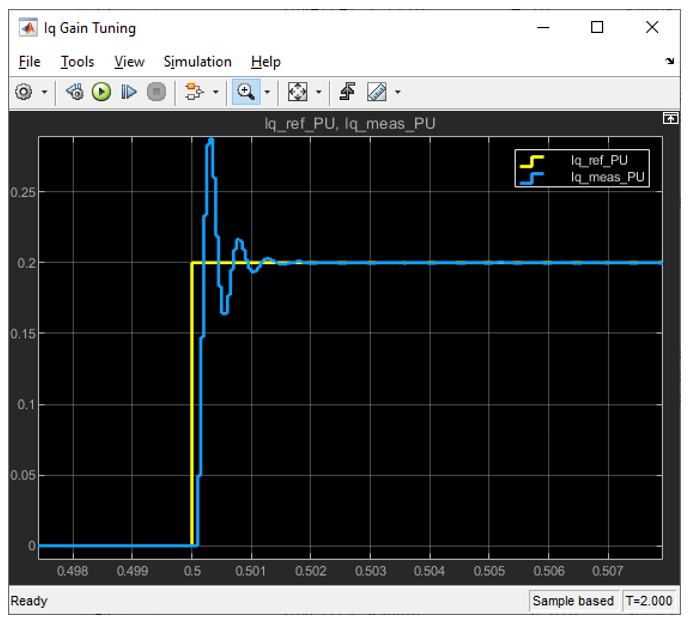
Симулируйте модель и постройте Iq_ref_PU и Iq_meas_PU и анализируйте переходной процесс. Это позволяет вам настраивать параметры управления для q - контроллер оси, чтобы достигнуть целей управления.
Можно следовать тому же методу для настройки d - ось текущий контроллер. В Поверхностном монтаже диалоговое окно параметров блоков PMSM, установленное параметр Mechanical input configuration на Torque.
