Используйте эти шаги, чтобы спроектировать текущую подсистему контроллера:
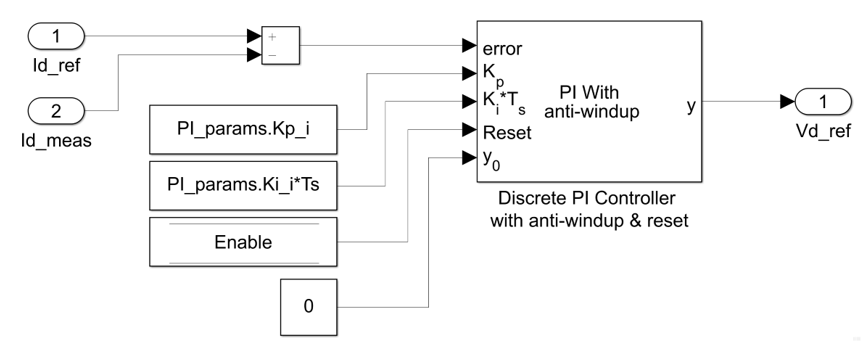
От библиотеки Motor Control Blockset™ в Simulink® Library Browser используйте Дискретный ПИ-контроллер с антизавершением & сбросьте блок (в библиотеке Controls/Controllers), чтобы спроектировать d - ось и q - ось текущее управление.
Функция MATLAB mcb.internal.SetControllerParameters (в скрипте инициализации модели), вычисляет усиления управления PI для d - ось и q - ось текущий контроллер и контроллер скорости. Для получения дополнительной информации относительно оценки усиления параметра управления, смотрите Оценочные Усиления Управления от Моторных Параметров. Смотрите файл скрипта инициализации модели mcb_pmsm_foc_qep_f28379d_data.m (используемый в примере, Ориентированном на поле на Управление PMSM Используя Квадратурный Энкодер) в течение времени выборки (Ts) 50μs.
В схеме подсистемы переменной Enable является Data Store Memory, используемый, чтобы сбросить контроллер. Переменная Adding Enable является дополнительной.
Подсистема также использует три постоянных блока с этими значениями:
PI_params.Kp_i
PI_params.Ki_i*Ts
0
Создайте подобную подсистему для q - ПИ-контроллер оси. Интегрируйте подсистемы для d - ось и q - ПИ-контроллеры оси в одну подсистему (Current_Controllers), который управляет d - осью и q - токи оси.
Добавьте Преобразование Кларка, парк Transform, Преобразование парка Inverse и блоки Генератора векторов Пробела из Motor Control Blockset/Controls/Math Transforms библиотека к подсистеме Current_controllers (что вы создали на шаге 1), как показано в этом рисунке.
![]()
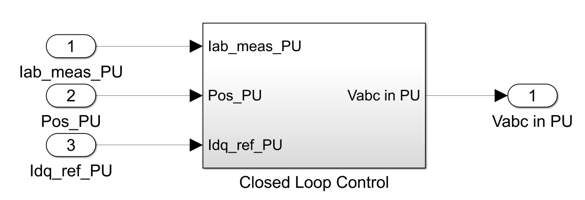
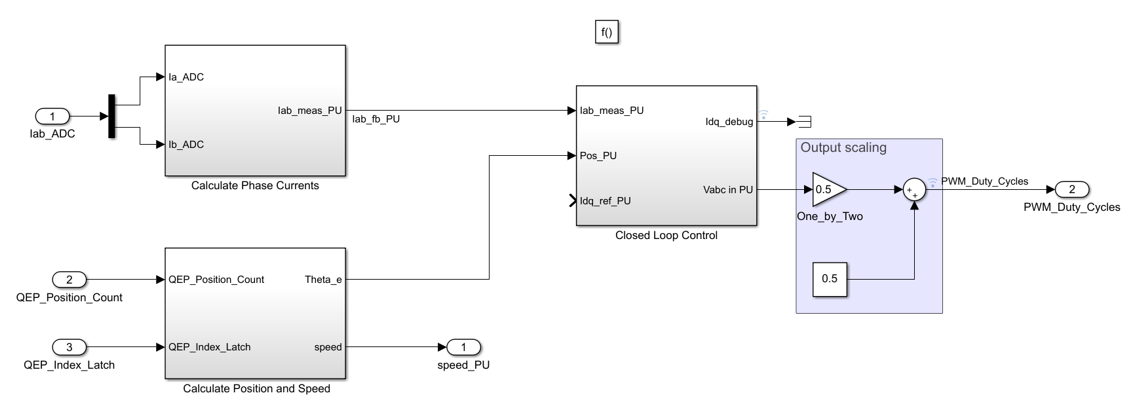
Интегрируйте компоненты, которые вы создали на шаге 2 в одну подсистему (Управление замкнутым циклом, которое реализует замкнутый цикл, ориентированный на поле на управление), как показано в этом рисунке.
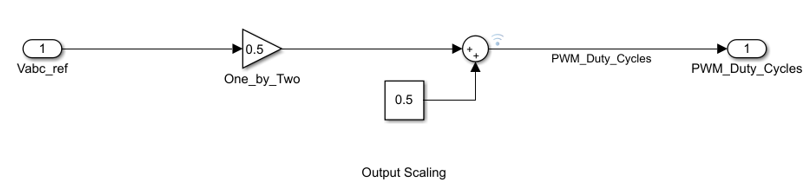
Создайте Выходную подсистему масштабирования, чтобы масштабировать Pulse Width Modulation (PWM) выходные параметры. Эта подсистема выводит нормированные рабочие циклы PWM (0-1) для модели объекта управления.
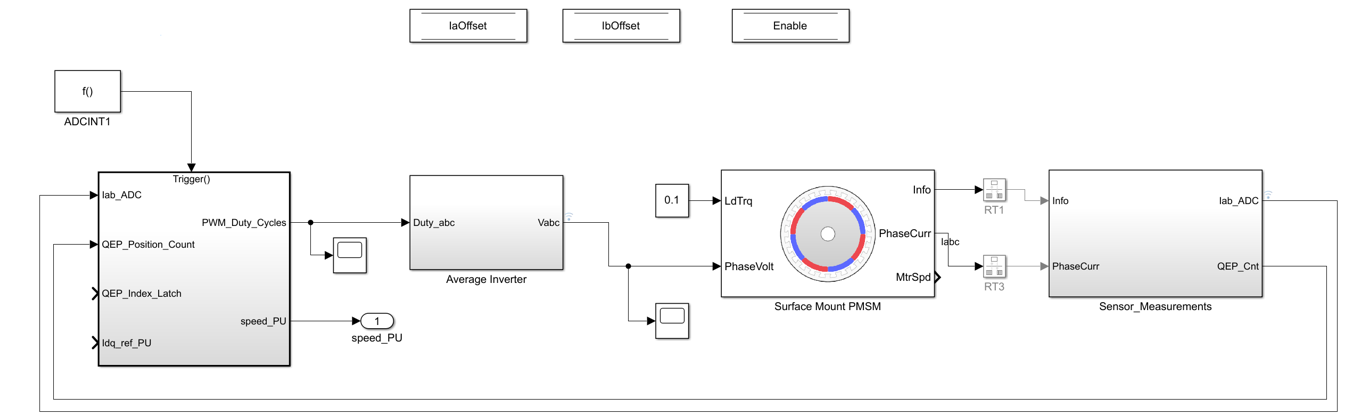
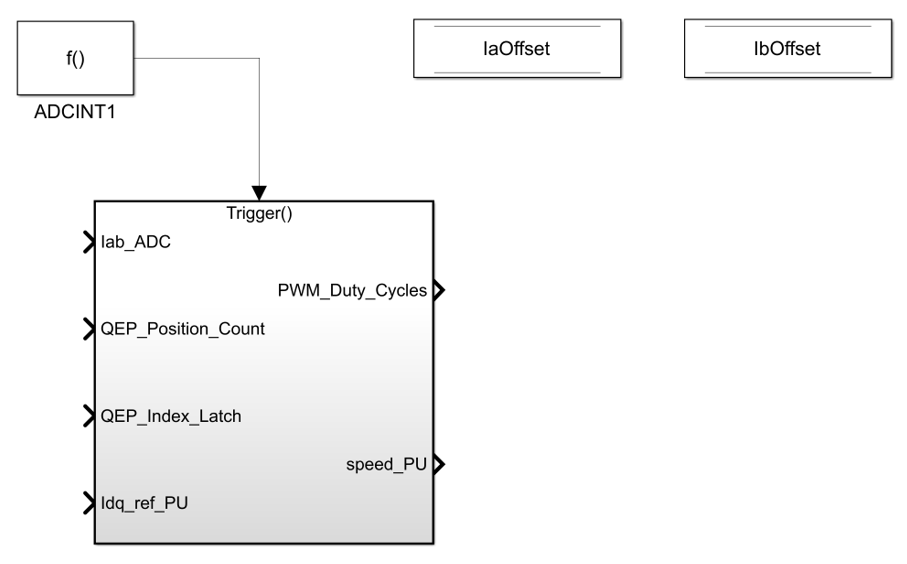
Создайте новую подсистему путем интеграции текущего масштабирования, декодирования положения QEP, Управления Замкнутым циклом и Выходных подсистем масштабирования. Добавьте триггерный блок из Simulink/Ports & Subsystems библиотека к этой подсистеме и установленный параметр Trigger type на function-call.
Добавьте блок Function-Call Generator из Simulink/Ports & Subsystems библиотека к подсистеме создается на шаге 5. Установите параметр Sample time блока, чтобы равняться шагу расчета цикла управления, Ts (который имеет значение по умолчанию 50e-6 s.
Интегрируйте модель объекта управления и подсистему контроллера, которую вы создали на шаге 6. Для подробных шагов о том, как создать модель объекта управления для системы блока управления приводом, смотрите, что Модель объекта управления Создания Использует Motor Control Blockset.