Сервоцилиндр двойного действия с сосредоточенным пружиной золотником в изотермической жидкой системе
Simscape / Жидкости / Valve Actuators & Forces

Блок Double-Acting Servo Valve Actuator (IL) моделирует сервоцилиндр двойного действия, расположенный как сосредоточенный пружиной золотник. Пружинное нейтральное положение - то, где золотник расположен в середину диапазона. Движение поршня, когда это - близкое полное дополнительное или полное сокращение, ограничивается одной из трех моделей жесткого упора. Сжимаемость жидкости опционально моделируется в обеих поршневых камерах.
Физический сигнал выход P сообщает о положении золотника.
Чтобы избежать механического устройства повреждают на привод, когда оно полностью расширено или в убранном положении, привод обычно отображает нелинейное поведение, когда поршень приближается к этим пределам. Блок Double-Acting Servo Valve Actuator (IL) моделирует это поведение с выбором трех моделей жесткого упора, которые моделируют существенную податливость через систему пружинного демпфера. Модели жесткого упора:
Stiffness and damping applied smoothly through transition region, damped rebound.
Full stiffness and damping applied at bounds, undamped rebound.
Full stiffness and damping applied at bounds, damped rebound.
Сила жесткого упора моделируется, когда поршень в его верхней или нижней границе. Граничная область в Transition region Spool stroke или поршневого смещения начальной буквы. За пределами этой области,
Для получения дополнительной информации об этих настройках, смотрите страницу блока Translational Hard Stop.
Блок Double-Acting Servo Actuator включает Изотермический Жидкий библиотечный блок и два блока Основы Simscape:
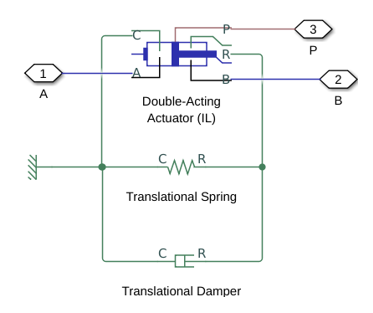
Привод двойного действия (G-IL) | Привод двойного действия (IL) | Ротационный привод двойного действия (IL) | Гидропривод одностороннего действия (IL)
