Синхронная машина с полевой схемой и никаким демпфером
Simscape / Электрический / Электромеханический / Синхронный

Блок Synchronous Machine Model 1.0 использует упрощенную модель параметризации в синхронных машинах. Используйте блок, чтобы смоделировать синхронные машины с обмоткой возбуждения и никакими демпферами.
Рисунок показывает эквивалентную электрическую схему для обмоток ротора и статора.
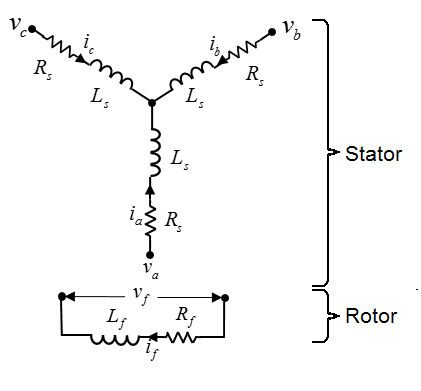
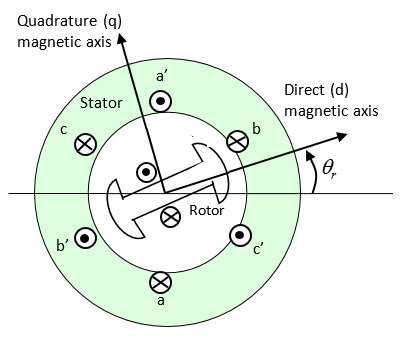
Схема показывает моторную конструкцию с однополюсной парой на роторе. Для соглашения осей, когда угол механического устройства ротора θr является нулем, a - выравниваются фаза и потоки постоянного магнита. Блок поддерживает второе определение оси ротора, для которого угол механического устройства ротора задан как угол между a - фазой магнитная ось и ротором q - ось.
Напряжения через обмотки статора заданы
где:
va, vb и vc являются отдельными напряжениями фазы через обмотки статора.
Rs является эквивалентным сопротивлением каждой обмотки статора.
ia, ib и ic являются токами, текущими в обмотках статора.
и скорости изменения магнитного потока в каждой обмотке статора.
Напряжение через обмотку возбуждения выражается как
где:
vf является отдельным напряжением фазы через обмотку возбуждения.
Rf является эквивалентным сопротивлением обмотки возбуждения.
if является текущим течением в обмотке возбуждения.
скорость изменения магнитного потока в обмотке возбуждения.
Постоянный магнит, обмотка возбуждения и обмотки статора трехзвездочной раны способствуют потоку, соединяющему каждую обмотку. Общий поток задан
где:
ψa, ψb и ψc являются общими потоками, соединяющими каждую обмотку статора.
Laa, Lbb и Lcc являются самоиндукциями обмоток статора.
Lab, Lac, Lba, Lbc, Lca и Lcb являются взаимной индуктивностью обмоток статора.
ψam, ψbm и ψcm являются потоками намагничивания, соединяющими обмотки статора.
Lamf, Lbmf и Lcmf являются взаимной индуктивностью обмотки возбуждения.
Индуктивность в обмотках статора является функциями ротора электрический угол и задана
где:
N является количеством пар полюса ротора.
θr является углом механического устройства ротора.
θe является ротором электрический угол.
rotor offset является 0 если вы задаете ротор электрический угол относительно d-оси или -pi/2 если вы задаете ротор электрический угол относительно q-оси.
Ls является самоиндукцией статора на фазу. Это значение является средней самоиндукцией каждой из обмоток статора.
Lm является колебанием индуктивности статора. Это значение является колебанием самоиндукции и взаимной индуктивности с изменяющимся углом ротора.
Ms является статором взаимная индуктивность. Это значение является средней взаимной индуктивностью между обмотками статора.
Обмотка соединения потока намагничивания, a-a’ является максимумом когда θe = 0 ° и нуль когда θe = 90 °. Поэтому:
и
где:
Lmf является взаимной полевой индуктивностью якоря.
ψf является потоком, соединяющим обмотку возбуждения.
Lf является индуктивностью обмотки возбуждения.
преобразование вектора Lmf, то есть,
Применение преобразования Парка с блоком, электрические уравнения определения производят выражение для крутящего момента, который независим от угла ротора.
Преобразование Парка задано
Применение преобразования Парка к первым двум электрическим уравнениям определения производит уравнения, которые задают поведение блока:
и
где:
vd, vq и v0 является d - ось, q - ось и напряжения нулевой последовательности. Эти напряжения заданы
id, iq и i0 является d - ось, q - ось и токи нулевой последовательности, заданные
Ld является статором d - индуктивность оси. Ld = Ls + Ms + 3/2 Lm.
ω является скоростью вращательного механического устройства.
Lq является статором q - индуктивность оси. Lq = Ls + Ms − 3/2 Lm.
L0 является индуктивностью нулевой последовательности статора. L0 = Ls – 2Ms.
T является крутящим моментом ротора. Для блока Synchronous Machine Model 1.0 крутящий момент течет из случая машины (порт C сохранения блока) к ротору машины (порт R сохранения блока).
J является инерцией ротора.
TL является крутящим моментом загрузки.
Bm является затуханием ротора.
Используйте настройки Variables, чтобы задать приоритет и начальные целевые значения для переменных в блоках перед симуляцией. Для получения дополнительной информации смотрите Приоритет Набора и Начальную Цель для Переменных в блоках (Simscape).
Распределение потока является синусоидальным.
[1] Kundur, P. Устойчивость энергосистемы и управление. Нью-Йорк, Нью-Йорк: Макгроу Хилл, 1993.
[2] Андерсон, пополудни анализ неработающих энергосистем. Нажатие IEEE, разработка энергосистем, 1995.
[3] Retif, J. M. С. Линь-Ши, утра Llor и Ф. Морэнд “Новое гибридное управление прямого крутящего момента для извилистого ротора синхронная машина”. 2 004 IEEE 35-я Ежегодная Конференция специалистов по Силовой электронике. Издание 2 (2004): 1438–1442.
[4] Общество энергетики IEEE. Станд. IEEE 1110-2002. Руководство IEEE для синхронных методов моделирования генератора и приложения в исследованиях устойчивости энергосистемы. Пискатауэй, NJ: IEEE, 2002.
BLDC | Switched Reluctance Machine | Synchronous Machine Field Circuit | Synchronous Machine Measurement | Synchronous Machine Model 2.1 | Synchronous Machine Round Rotor | Synchronous Machine Salient Pole | Synchronous Reluctance Machine


