Моменты в соединениях, которые компенсируют силу тяжести
Robotics System Toolbox / Алгоритмы Манипулятора
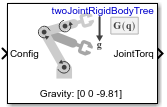
Блок Gravity Torque возвращает объединенные крутящие моменты, требуемые содержать робота в данной настройке с текущей установкой Gravity на модели робота Rigid body tree.

