Полосо-заграждающая фильтрация сигнала
y = bandstop(x,wpass)x использование заграждающего фильтра с частотным диапазоном полосы задерживания, заданным двухэлементным векторным wpass и выразил в нормированных единицах рад/выборки π. bandstop использует фильтр минимального порядка с затуханием в полосе задерживания 60 дБ и компенсирует задержку, введенную фильтром. Если x матрица, функция фильтрует каждый столбец независимо.
y = bandstop(___,Name,Value)
[ также возвращает y,d] = bandstop(___)digitalFilter объект d используемый, чтобы отфильтровать вход.
bandstop(___) без выходных аргументов строит входной сигнал и накладывает отфильтрованный сигнал.
Создайте сигнал, произведенный на уровне 1 кГц в течение 1 секунды. Сигнал содержит три тона, один на уровне 50 Гц, другого на уровне 150 Гц и одну треть на уровне 250 Гц. Высокочастотные и низкочастотные тоны оба имеют дважды амплитуду промежуточного тона. Сигнал встраивается в Гауссов белый шум отклонения 1/100.
fs = 1e3; t = 0:1/fs:1; x = [2 1 2]*sin(2*pi*[50 150 250]'.*t) + randn(size(t))/10;
Заграждающий фильтр сигнал удалить тон средней частоты. Задайте частоты полосы пропускания 100 Гц и 200 Гц. Отобразите исходные и отфильтрованные сигналы, и также их спектры.
bandstop(x,[100 200],fs)

Реализуйте основной синтезатор цифровой музыки и используйте его, чтобы проигрывать традиционную песню. Задайте частоту дискретизации 2 кГц. Постройте спектрограмму песни.
fs = 2e3; t = 0:1/fs:0.3-1/fs; l = [0 130.81 146.83 164.81 174.61 196.00 220 246.94]; m = [0 261.63 293.66 329.63 349.23 392.00 440 493.88]; h = [0 523.25 587.33 659.25 698.46 783.99 880 987.77]; note = @(f,g) [1 1 1]*sin(2*pi*[l(g) m(g) h(f)]'.*t); mel = [3 2 1 2 3 3 3 0 2 2 2 0 3 5 5 0 3 2 1 2 3 3 3 3 2 2 3 2 1]+1; acc = [3 0 5 0 3 0 3 3 2 0 2 2 3 0 5 5 3 0 5 0 3 3 3 0 2 2 3 0 1]+1; song = []; for kj = 1:length(mel) song = [song note(mel(kj),acc(kj)) zeros(1,0.01*fs)]; end song = song/(max(abs(song))+0.1); % To hear, type sound(song,fs) pspectrum(song,fs,'spectrogram','TimeResolution',0.31, ... 'OverlapPercent',0,'MinThreshold',-60)

Заграждающий фильтр сигнал разделить средний регистр от других двух. Задайте частоты полосы пропускания 230 Гц и 450 Гц. Постройте исходные и отфильтрованные сигналы во временном и частотном диапазоне.
bong = bandstop(song,[230 450],fs);
% To hear, type sound(bong,fs)
bandstop(song,[230 450],fs)
Постройте спектрограмму песни без среднего регистра.
figure pspectrum(bong,fs,'spectrogram','TimeResolution',0.31, ... 'OverlapPercent',0,'MinThreshold',-60)

Отфильтруйте белый шум, произведенный на уровне 1 кГц с помощью бесконечного заграждающего фильтра импульсной характеристики с шириной полосы задерживания 100 Гц. Используйте различные значения крутизны. Постройте спектры отфильтрованных сигналов.
fs = 1000; x = randn(20000,1); [y1,d1] = bandstop(x,[ 50 150],fs,'ImpulseResponse','iir','Steepness',0.5); [y2,d2] = bandstop(x,[200 300],fs,'ImpulseResponse','iir','Steepness',0.8); [y3,d3] = bandstop(x,[350 450],fs,'ImpulseResponse','iir','Steepness',0.95); pspectrum([y1 y2 y3],fs) legend('Steepness = 0.5','Steepness = 0.8','Steepness = 0.95', ... 'Location','north')

Вычислите и постройте частотные характеристики фильтров.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) legend('Steepness = 0.5','Steepness = 0.8','Steepness = 0.95', ... 'Location','north') ylim([-120 20])

Сделайте фильтры асимметричными путем определения различных значений крутизны в ниже и более высокие частоты полосы пропускания.
[y1,d1] = bandstop(x,[ 50 150],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); [y2,d2] = bandstop(x,[200 300],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); [y3,d3] = bandstop(x,[350 450],fs,'ImpulseResponse','iir','Steepness',[0.5 0.8]); pspectrum([y1 y2 y3],fs)

Вычислите и постройте частотные характеристики фильтров.
[h1,f] = freqz(d1,1024,fs); [h2,~] = freqz(d2,1024,fs); [h3,~] = freqz(d3,1024,fs); plot(f,mag2db(abs([h1 h2 h3]))) ylim([-120 20])

'Steepness' аргумент управляет шириной областей перехода фильтра. Чем ниже крутизна, тем шире область перехода. Чем выше крутизна, тем более узкий область перехода.
Чтобы интерпретировать крутизну фильтра, рассмотрите следующие определения:
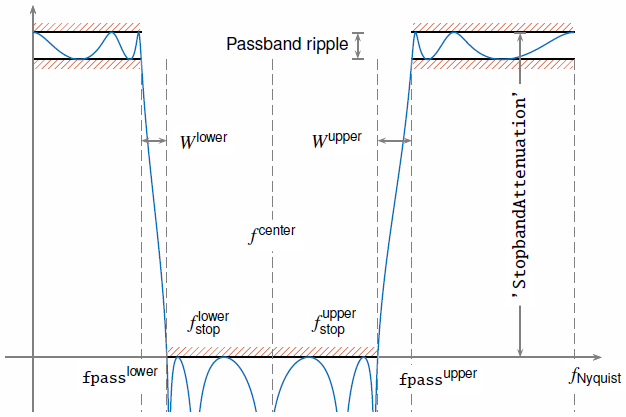
Частота Найквиста, f Найквист, является самой высокой частотной составляющей сигнала, который может быть произведен на данном уровне без искажения. Найквисту f 1 год (×π рад/выборка), когда у входного сигнала нет времени информация и fs/2 герц, когда входной сигнал является расписанием или когда вы задаете частоту дискретизации.
Более низкие и верхние частоты полосы задерживания фильтра, f stoplower и f stopupper, являются частотами, между которыми затухание равно или больше, чем значение, заданное с помощью 'StopbandAttenuation'.
Центр области полосы задерживания является центром f = (f stoplower + f stopupper)/2.
Более низкой шириной перехода фильтра, W ниже, является f stoplower – fpassниже.
Верхней шириной перехода фильтра, верхний W, является fpassверхний – f stopupper.
Большинство неидеальных фильтров также ослабляет входной сигнал через полосу пропускания. Максимальное значение этого зависимого частотой затухания называется неравномерностью в полосе пропускания. Каждый фильтр используется bandstop имеет неравномерность в полосе пропускания 0,1 дБ.
Чтобы управлять шириной полос перехода, можно задать 'Steepness' как любой двухэлементный вектор, [s ниже, s, верхний], или скаляр. Когда вы задаете 'Steepness' как вектор, функция:
Вычисляет более низкую ширину перехода как
W ниже = (1 – s ниже) × (центр f – fpassниже.
Когда первый элемент 'Steepness' равно 0,5, ширина перехода составляет 50% (центр f – fpassниже.
Как первый элемент 'Steepness' подходы 1, ширина перехода прогрессивно становится более узкой, пока она не достигает минимального значения 1% (центр f – fpassниже.
Вычисляет верхнюю ширину перехода как
W, верхний = (1 – верхний s) × (fpassверхний – центр f).
Когда второй элемент 'Steepness' равно 0,5, ширина перехода составляет 50% (fpassверхний – центр f).
Как второй элемент 'Steepness' подходы 1, ширина перехода прогрессивно становится более узкой, пока она не достигает минимального значения 1% (fpassверхний – центр f).
Когда вы задаете 'Steepness' как скаляр, функция проектирует фильтр с равными более низкими и верхними ширинами перехода. Значение по умолчанию 'Steepness' 0.85.
