Пакет: TuningGoal
Целевая форма цикла для настройки системы управления
Используйте TuningGoal.LoopShape задавать целевой gain profile (получают как функция частоты) ответа разомкнутого контура. TuningGoal.LoopShape ограничивает разомкнутый контур, ответ "точка-точка" (L) в заданном местоположении в вашей системе управления. Используйте эту настраивающую цель для системы управления, настраивающейся с настраивающимися командами, такими как systune или looptune.
Когда вы настраиваете систему управления, целевой профиль коэффициента усиления разомкнутого контура преобразован в ограничения на обратную функцию чувствительности inv (S) = (I + L) и дополнительную функцию чувствительности T = 1–S. Эти ограничения проиллюстрированы для настроенной системы представителя в следующем рисунке.
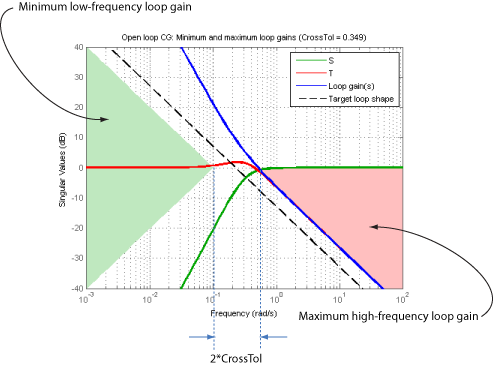
Где L очень больше 1, минимальное ограничение усиления на inv (S) (зеленая теневая область) эквивалентно минимальному ограничению усиления на L. Точно так же, где L намного меньше, чем 1, максимальное ограничение усиления на T (красная теневая область) эквивалентно максимальному ограничению усиления на L. Разрывом между этими двумя ограничениями является дважды CrossTol параметр, который задает диапазон частот, где усиление цикла может пересечь 0 дБ.
Для мультивхода, мультивыход (MIMO) системы управления, значения в профиле усиления, больше, чем 1, интерпретированы как минимальные требования к производительности. Такие значения являются нижними границами на самом маленьком сингулярном значении ответа разомкнутого контура. Получите значения профиля, меньше чем один интерпретирован как минимальные требования спада, которые являются верхними границами на самом большом сингулярном значении ответа разомкнутого контура. Для получения дополнительной информации о сингулярных значениях, смотрите sigma.
Используйте TuningGoal.LoopShape когда форма цикла около перекрестного соединения проста или хорошо изученная (такие как интегральное действие). Чтобы задать только высокое усиление или низко получить ограничения в определенных диапазонах частот, используйте TuningGoal.MinLoopGain и TuningGoal.MaxLoopGain. Когда вы делаете так, программное обеспечение определяет лучшую форму цикла около перекрестного соединения.
Req =
TuningGoal.LoopShape(location,loopgain)loopgain задает целевой профиль коэффициента усиления разомкнутого контура. Можно задать целевой профиль усиления (максимальное усиление через пару ввода-вывода) как сглаженная передаточная функция или делать набросок кусочного ошибочного профиля с помощью frd модель.
Req = TuningGoal.LoopShape(location,loopgain,crosstol)crosstol описывает допуск в десятилетиях. Например, crosstol = 0.5 позволяет перекрестные соединения усиления в течение пяти лет по обе стороны от целевой частоты среза, заданной loopgain. Когда вы не используете crosstol, настраивающаяся цель использует значение по умолчанию 0,1 десятилетий. Можно увеличить crosstol при настройке систем управления MIMO. Выполнение так позволяет более широко различные частоты среза для различных циклов в системе.
Req = TuningGoal.LoopShape( задает только целевую частоту среза усиления. Этот синтаксис эквивалентен определению чистой формы цикла интегратора, location,wc)loopgain = wc/s.
Req = TuningGoal.LoopShape( указывает диапазон для целевой частоты среза усиления. Область значений является вектором из формы location,wcrange)wcrange = [wc1,wc2]. Этот синтаксис эквивалентен использованию геометрического среднего sqrt(wc1*wc2) как wc и установка crosstol к полуширине wcrange в десятилетиях. Используя область значений вместо одного wc повышения стоимости способность настраивающегося алгоритма осуществить целевую форму цикла для всех циклов в системе управления MIMO.
|
Местоположение, где форма ответа разомкнутого контура, которая будет ограничена, измеряется в виде вектора символов или массива ячеек из символьных векторов, которые идентифицируют одно или несколько местоположений в системе управления, чтобы настроиться. То, какие местоположения доступны, зависит от того, какую систему вы настраиваете:
Требование формы цикла применяется к передаточной функции разомкнутого контура "точка-точка" в заданном местоположении. Та передаточная функция является ответом разомкнутого контура, полученным путем введения сигналов в местоположении и измерения сигналов возврата в той же точке. Если |
|
Целевой профиль коэффициента усиления разомкнутого контура как функция частоты. Можно задать Для мультивхода, мультивыход (MIMO) системы управления, значения в профиле усиления, больше, чем 1, интерпретированы как минимальные требования к производительности. Эти значения являются нижними границами на самом маленьком сингулярном значении Если вы настраиваетесь в дискретное время (то есть, с помощью a |
|
Допуск в месте частоты среза, в десятилетиях. заданный как скалярное значение. Например, Значение по умолчанию: 0.1 |
|
Целевая частота среза в виде значения положительной скалярной величины. Специальный |
|
Расположитесь для целевой частоты среза в виде вектора из формы |
|
Целевая форма цикла как функция частоты в виде SISO Программное обеспечение автоматически сопоставляет входной параметр |
|
Допуск на частоте среза усиления, в десятилетиях. Начальное значение Значение по умолчанию: |
|
Диапазон частот, в котором настройка цели осуществляется в виде вектора-строки из формы Установите Req.Focus = [1,100]; Значение по умолчанию: |
|
Требование устойчивости к динамике с обратной связью в виде 1 ( Когда Значение по умолчанию: 1 ( |
|
Переключитесь для того, чтобы автоматически масштабировать сигналы цикла в виде В многоконтурном или системах управления MIMO, каналы обратной связи автоматически перемасштабируются, чтобы компенсировать недиагональные условия в передаточной функции разомкнутого контура (периоды взаимодействия цикла). Установите Значение по умолчанию: |
|
Местоположение, в котором форма ответа разомкнутого контура быть ограниченной измеряется в виде массива ячеек из символьных векторов, которые идентифицируют одну или несколько аналитических точек в системе управления, чтобы настроиться. Например, если Начальное значение |
|
Модели, к которым настраивающаяся цель применяется в виде вектора из индексов. Используйте Req.Models = 2:4; Когда Значение по умолчанию: |
|
Обратная связь, чтобы открыться при оценке настраивающейся цели в виде массива ячеек из символьных векторов, которые идентифицируют открывающие цикл местоположения. Настраивающаяся цель оценена против настройки разомкнутого контура, созданной вводной обратной связью в местоположениях, которые вы идентифицируете. Если вы используете настраивающуюся цель настроить модель Simulink системы управления, то Если вы используете настраивающуюся цель настроить обобщенное пространство состояний ( Например, если Значение по умолчанию: |
|
Имя настраивающейся цели в виде вектора символов. Например, если Req.Name = 'LoopReq'; Значение по умолчанию: |
Создайте целевое требование профиля усиления для следующей системы управления. Задайте интегральное действие, получите перекрестное соединение в 1, и требование спада 40 дБ/десятилетие.

Требование должно примениться к ответу разомкнутого контура, измеренному в AnalysisPoint блок X. Задайте перекрестный допуск 0,5 десятилетий.
LS = frd([100 1 0.0001],[0.01 1 100]);
Req = TuningGoal.LoopShape('X',LS,0.5);Программное обеспечение преобразует LS в сглаженную функцию частоты, которая аппроксимирует кусочно заданное требование. Отобразите требование с помощью viewGoal.
viewGoal(Req)

Зеленые и красные области указывают на границы для обратной чувствительности, inv(S) = 1-G*C, и дополнительная чувствительность, T = 1-S, соответственно. Разрыв между этими областями в 0 усилениях дБ отражает заданный перекрестный допуск, который является пятью годами любой стороне целевого перекрестного соединения цикла.
Когда вы используете viewGoal(Req,CL) подтверждать настроенную модель с обратной связью этой системы управления, CL, настроенные значения S и T также построены.
Создайте отдельные требования формы цикла для внутренних циклов и внешних контуров следующей системы управления.

Для внутреннего цикла задайте форму цикла с интегральным действием, получите перекрестное соединение в 1, и требование спада 40 дБ/десятилетие. Кроме того, укажите, что это требование формы цикла должно быть осуществлено с открытым внешним контуром.
LS2 = frd([100 1 0.0001],[0.01 1 100]); Req2 = TuningGoal.LoopShape('X2',LS2); Req2.Openings = 'X1';
Определение 'X2' для location указывает на тот Req2 применяется к точке - чтобы указать, передаточная функция разомкнутого контура в местоположении X2. Установка Req2.Openings указывает, что цикл открыт в аналитической точке X1 когда Req2 осуществляется.
По умолчанию, Req2 налагает требование устойчивости к внутреннему циклу, а также требование формы цикла. В некоторых системах управления, однако, устойчивость внутреннего цикла не может требоваться или может быть невозможна достигнуть. В этом случае удалите требование устойчивости из Req2 можно следующим образом.
Req2.Stabilize = false;
Для внешнего контура задайте форму цикла с интегральным действием, получите перекрестное соединение в 0,1, и требование спада 20 дБ/десятилетие.
LS1 = frd([10 1 0.01],[0.01 0.1 10]);
Req1 = TuningGoal.LoopShape('X1',LS1);Определение 'X1' для location указывает на тот Req1 применяется к точке - чтобы указать, передаточная функция разомкнутого контура в местоположении X1. Вы не должны устанавливать Req1.Openings потому что эта форма цикла осуществляется с замкнутым внутренним кругом.
Вы можете хотеть настроить систему управления с обоими циклами, формирующими требования Req1 и Req2. Для этого используйте оба требования в качестве входных параметров к настраивающейся команде. Например, предположите CL0 настраиваемый genss модель системы управления с обратной связью. В этом случае используйте [CL,fSoft] = systune(CL0,[Req1,Req2]) настроить систему управления на оба требования.
Создайте требование формы цикла для обратной связи на 'q' в модели Simulink rct_airframe2. Укажите, что требование формы цикла осуществляется с 'az' открытый цикл.
Откройте модель.
open_system('rct_airframe2')

Создайте требование формы цикла, которое осуществляет интегральное действие с перекрестным соединением 2 рад/с для 'q' цикл. Эта форма цикла соответствует форме цикла 2 / _ s_.
s = tf('s'); shape = 2/s; Req = TuningGoal.LoopShape('q',shape);
Задайте местоположение, в котором можно открыть дополнительный цикл при осуществлении требования.
Req.Openings = 'az';
Чтобы использовать это требование, чтобы настроить модель Simulink, создайте slTuner взаимодействуйте через интерфейс к модели. Идентифицируйте блок, чтобы настроить интерфейс.
ST0 = slTuner('rct_airframe2','MIMO Controller');
Определяйте оба az и q когда анализ указывает в slTuner интерфейс.
addPoint(ST0,{'az','q'});
Эта команда делает q доступный как аналитическое местоположение. Это также позволяет настраивающемуся требованию быть осуществленным с циклом, открытым в az.
Можно теперь настроить модель с помощью Req и любые другие настраивающие требования. Например:
[ST,fSoft] = systune(ST0,Req);
Final: Soft = 0.845, Hard = -Inf, Iterations = 51
Создайте настраивающееся требование, указывающее что ответ разомкнутого контура цикла, идентифицированного 'X' перекрестное усиление единицы между 50 и 100 рад/с.
Req = TuningGoal.LoopShape('X',[50,100]);Исследуйте получившееся требование, чтобы видеть целевую форму цикла.
viewGoal(Req)

График показывает, что требование задает интегральную форму цикла, с перекрестным соединением приблизительно 70 рад/с, геометрическим средним области значений [50,100]. Разрыв на уровне 0 дБ между минимальным низкочастотным усилением (зеленая область) и максимальным высокочастотным усилением (красная область) отражает позволенную перекрестную область значений [50,100].
Эта настраивающая цель налагает неявное ограничение устойчивости на функцию чувствительности с обратной связью, измеренную в Location, оцененный с циклами, открытыми в точках, идентифицирован в Openings. Движущими силами, затронутыми этим неявным ограничением, является stabilized dynamics для этой настраивающей цели. MinDecay и MaxRadius опции systuneOptions управляйте границами на этих неявно ограниченных движущих силах. Если оптимизации не удается соответствовать границам по умолчанию, или если конфликт границ по умолчанию с другими требованиями, использовать systuneOptions изменить эти значения по умолчанию.
Когда вы настраиваете систему управления с помощью TuningGoal, программное обеспечение преобразует настраивающуюся цель в нормированное скалярное значение f (x), где x является вектором из свободных (настраиваемых) параметров в системе управления. Программное обеспечение затем настраивает значения параметров, чтобы минимизировать f (x) или управлять f (x) ниже 1, если настраивающейся целью является трудное ограничение.
Для TuningGoal.LoopShape, f (x) дают:
Здесь, S = D –1 [I – L (s, x)] –1D является масштабированной функцией чувствительности в заданном местоположении, где L (s, x) является сформированным ответом разомкнутого контура. D является автоматически вычисленным масштабным коэффициентом цикла. (Если LoopScaling свойство установлено в 'off', затем D = I.) T = S – I является дополнительной функцией чувствительности.
WS и WT являются функциями взвешивания частоты, выведенными из заданной формы цикла. Усиления этих функций примерно совпадают с LoopGain и 1/LoopGain, для значений в пределах от-20 дБ к 60 дБ. По числовым причинам функции взвешивания выравниваются вне этой области значений, если заданный профиль усиления цикла не изменяет наклон для усилений выше 60 дБ или ниже-60 дБ. Поскольку полюса WS или WT близко к s = 0 или s = Inf может привести к плохому числовому созданию условий systune задача оптимизации, не рекомендуется задать формы цикла с очень низкочастотной или очень высокочастотной динамикой.
Чтобы получить WS и WT, используйте:
[WS,WT] = getWeights(Req,Ts)
где Req настраивающаяся цель и Ts шаг расчета, в котором вы настраиваетесь (Ts = 0 в течение непрерывного времени). Для получения дополнительной информации об эффектах функций взвешивания на числовой устойчивости, смотрите, Визуализируют Настраивающиеся Цели.
frd | looptune | systune | TuningGoal.Gain | TuningGoal.MaxLoopGain | TuningGoal.MinLoopGain | TuningGoal.Tracking | viewGoal | looptune
(for slTuner) (Simulink Control Design) | slTuner (Simulink Control Design) | systune (for slTuner) (Simulink Control Design)
