В этом примере показано, как соединить числовые модели LTI, представляющие несколько компонентов системы, чтобы создать одну числовую модель системы с обратной связью, с помощью арифметики модели и соединительных команд.
Создайте модель следующей одноконтурной системы управления.
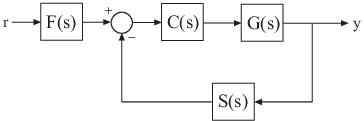
Обратная связь включает объект G (s), контроллер C (s) и представление динамики датчика, S (s). Система также включает предварительный фильтр F (s).
Создайте объекты модели, представляющие каждый из компонентов.
G = zpk([],[-1,-1],1); C = pid(2,1.3,0.3,0.5); S = tf(5,[1 4]); F = tf(1,[1 1]);
Объект G является нулями, полюсами и усилением (zpk) модель с двойным полюсом в s = –1. Объект модели C является ПИД-регулятором. Модели F и S являются передаточными функциями.
Соедините контроллер и модель объекта управления.
H = G*C;
Объединить модели с помощью оператора умножения *, введите модели в обратном порядке по сравнению с блок-схемой.
Создайте неотфильтрованный ответ с обратной связью .
T = feedback(H,S);
Внимание
Не используйте арифметику модели, чтобы создать T алгебраически:
T = H/(1+H*S)
Это вычисление копирует полюса H, который увеличивает порядок модели и может привести к вычислительной погрешности.
Создайте целый отклик системы с обратной связью от r до y.
T_ry = T*F;
T_ry Числовая Модель LTI представление совокупной системы с обратной связью. T_ry не отслеживает коэффициенты компонентов GCF, и S.
Можно работать с T_ry с любой системой управления Control System Toolbox™ или аналитическими командами.
connect | feedback | parallel | series
